

به نام خدا
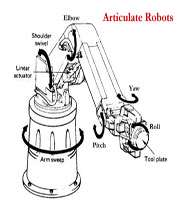
در این مجموعه تاپیک ها که در مورد مطالب رباتیک است و توسط استاد بزرگوارمان "سرکار سید خاموشی" از منبع : http://www.tebyan.net/index.aspx?PID...mp;PageIndex=0 ارائه شده است به آسانی و با زبان ساده با رباتیک از ابتدا آشنا میشوید.
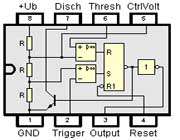
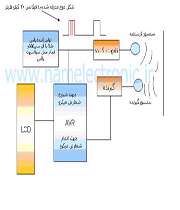
به طوری که اگر هیچ چیزی در مورد حتی ساده ترین قطعات الکترونیک مانند ترانزیستور و دیود نمیدانید، در این مجموعه به راحتی و فقط با دانستن قوانین ساده برق، با تک تک مراحل ساخت ربات، تک تک قطعات آن مانند ترانزیستور، دیود، موتورهای DC، میکروکنترلر 8051 و AVR و... به صورتی کاربردی در رباتیک آشنا میشوید.

این مجموعه به صورت نسخه اندروید نیز آماده شده است:














دیدگاه