

سلام و عرض احترام.
دوستان بنده میخوام برای اولین بار یه موتور دی سی گیربکس دار رو با l298 درایو کنم، ولتاژ موتورم 12 ولته و جریانش هم حداکثر 1 آمپر.
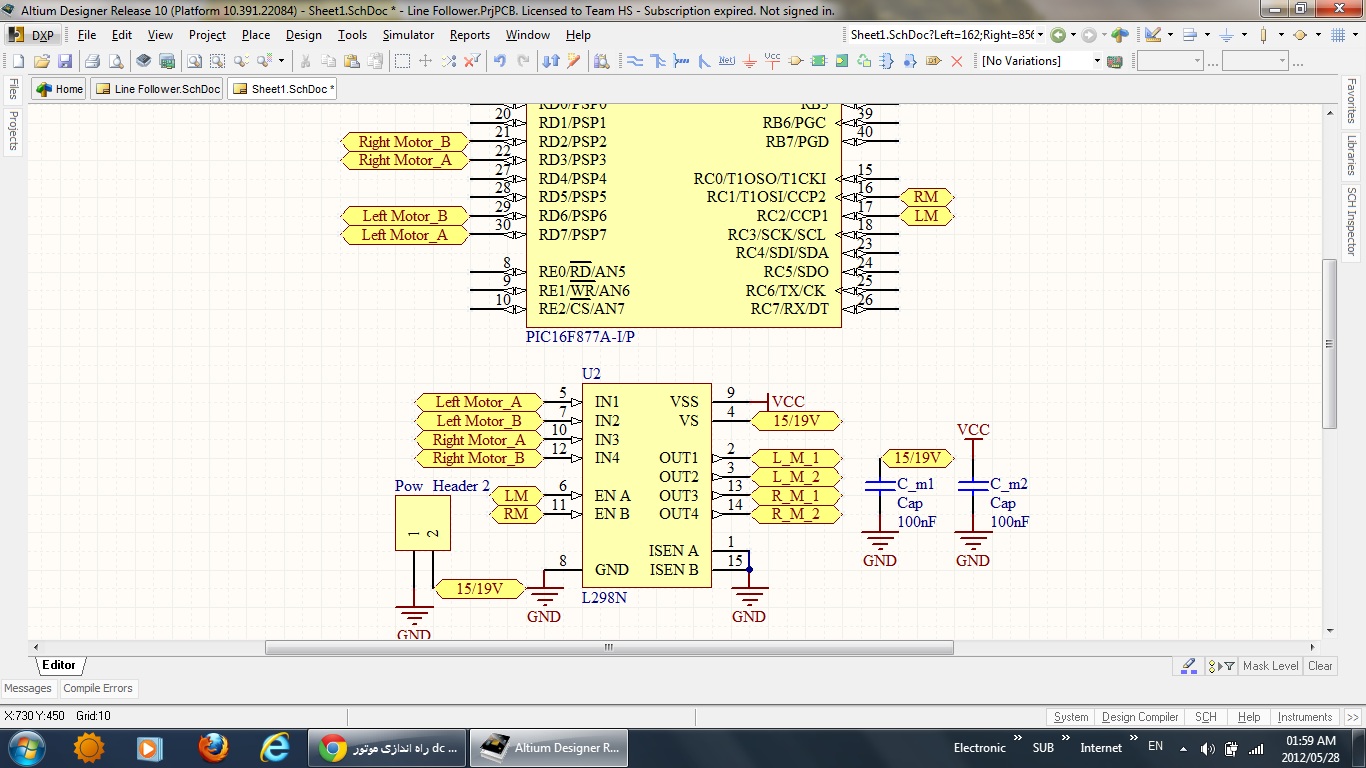
فقط هم در حد تئوری میدونم که وقتی از l298 استفاده میشه برا راه اندازی موتور dc، باید اول پایه 6 رو ولتاژ 5 بدیم واگر به پایه5 (input1) ولتاژ 5 رو بدیم و به پایه 7(input2) ولتاژ 0 (یعنی زمینش کنیم) موتور شروع به چرخش میکنه و اگر به input1 ولتاژ 0 وبه input2 ولتاژ 5 رو متصل کنیم موتور برعکس حالت اول میچرخه در صورتی که هر دو پایه ورودی ولتاژ بالا یا هر دو ولتاژ پایین داشته باشن موتور ترمز میکنه
حالا اگر به پایه 6 ولتاژ 0 بدیم موتور ازاده (ترمز نمیکنه و نمیچرخه) (مثل اینکه موتور روشن نیست و ورودی های موتور به هم متصل نیستن)
موتور دومی هم اگر در کار باشه مثل موتور اول با Input 3 ,input 4 کنترل میشه
و ما باید پایه های input 1, input 2, input 3 ,input 4 رو به میکرو متصل کنیم تا بتونیم موتورها رو کنترل کنیم
درست عرض میکنم؟؟!
البته این کنترل جهت چرخش موتور بود برای کنترل سرعت باید با روش PWM ولتاژ رو به پایه Enable بدیم که دیگه نمیدونم باید چیکار کنیم؟؟؟!!!
و یه سوال :redface:
ما دو تا از پین های میکرو رو میخوایم که به عنوان ورودی وارد درایور میشن و با اون میتونیم موتور رو چپ گرد راستگرد یا ترمز کنیم، درست؟
حالا ما باید با high و low کردن این 2 تا پایه تو برناممون موتور رو چپگرد راستگرد کنیم، و کار برنامه نویسی خاص و بیشتر دیگه ای نداره درست عرض میکنم؟؟
حالا البته گذشته از کنترل سرعتش...
راستی میکروم 16f877a و کامپایلرم pbp هست.
بسیار متشکر میشم از دوستان با تجره تا بنده رو یاری بفرمایند.
دوستان بنده میخوام برای اولین بار یه موتور دی سی گیربکس دار رو با l298 درایو کنم، ولتاژ موتورم 12 ولته و جریانش هم حداکثر 1 آمپر.
فقط هم در حد تئوری میدونم که وقتی از l298 استفاده میشه برا راه اندازی موتور dc، باید اول پایه 6 رو ولتاژ 5 بدیم واگر به پایه5 (input1) ولتاژ 5 رو بدیم و به پایه 7(input2) ولتاژ 0 (یعنی زمینش کنیم) موتور شروع به چرخش میکنه و اگر به input1 ولتاژ 0 وبه input2 ولتاژ 5 رو متصل کنیم موتور برعکس حالت اول میچرخه در صورتی که هر دو پایه ورودی ولتاژ بالا یا هر دو ولتاژ پایین داشته باشن موتور ترمز میکنه
حالا اگر به پایه 6 ولتاژ 0 بدیم موتور ازاده (ترمز نمیکنه و نمیچرخه) (مثل اینکه موتور روشن نیست و ورودی های موتور به هم متصل نیستن)
موتور دومی هم اگر در کار باشه مثل موتور اول با Input 3 ,input 4 کنترل میشه
و ما باید پایه های input 1, input 2, input 3 ,input 4 رو به میکرو متصل کنیم تا بتونیم موتورها رو کنترل کنیم
درست عرض میکنم؟؟!
البته این کنترل جهت چرخش موتور بود برای کنترل سرعت باید با روش PWM ولتاژ رو به پایه Enable بدیم که دیگه نمیدونم باید چیکار کنیم؟؟؟!!!
و یه سوال :redface:
ما دو تا از پین های میکرو رو میخوایم که به عنوان ورودی وارد درایور میشن و با اون میتونیم موتور رو چپ گرد راستگرد یا ترمز کنیم، درست؟
حالا ما باید با high و low کردن این 2 تا پایه تو برناممون موتور رو چپگرد راستگرد کنیم، و کار برنامه نویسی خاص و بیشتر دیگه ای نداره درست عرض میکنم؟؟
حالا البته گذشته از کنترل سرعتش...
راستی میکروم 16f877a و کامپایلرم pbp هست.
بسیار متشکر میشم از دوستان با تجره تا بنده رو یاری بفرمایند.





 )
)

دیدگاه