

جلسه اول:آشنایی با کامپایلر و ایجاد پروژه
سلام
ان شالله از امروز به بعد می خوایم با هم میکرو PIC رو توسط کامپایلر MPLAB و زبان برنامه نویسی C شروع کنیم. این شرکت (میکروچیپ) در کمتر از چندین سال از تمامی رقیب ها پیشی گرفت و الان اولین و بهترین میکروکنترولر دنیا محسوب می شه (در میکروکنترولر های 8 بیتی و 16 بیتی).من هم چون قدرت خانواده 18f رو نسبت به بقیه مناسب دیدم و رفرنسهای مناسبی هم پیدا کردم فوکس خودم رو روی این نسل بیشتر می کنم و امیدوارم بتونیم بیشتر از دانش هم استفاده کنیم.
مراحل کار:
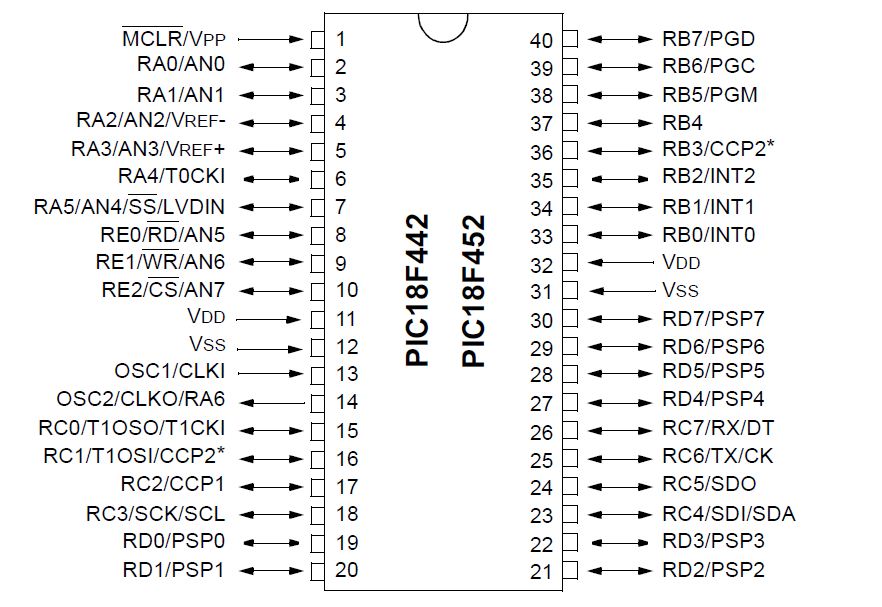
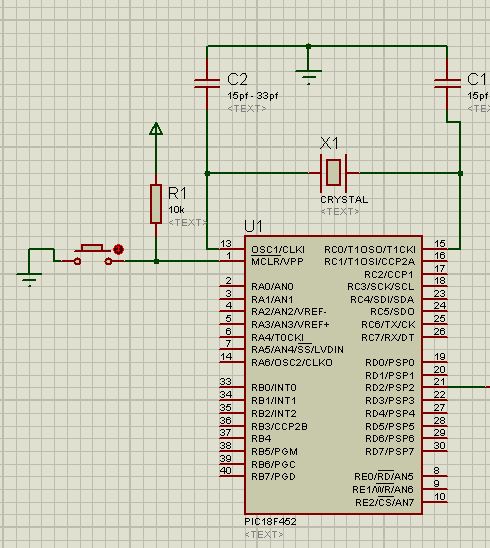
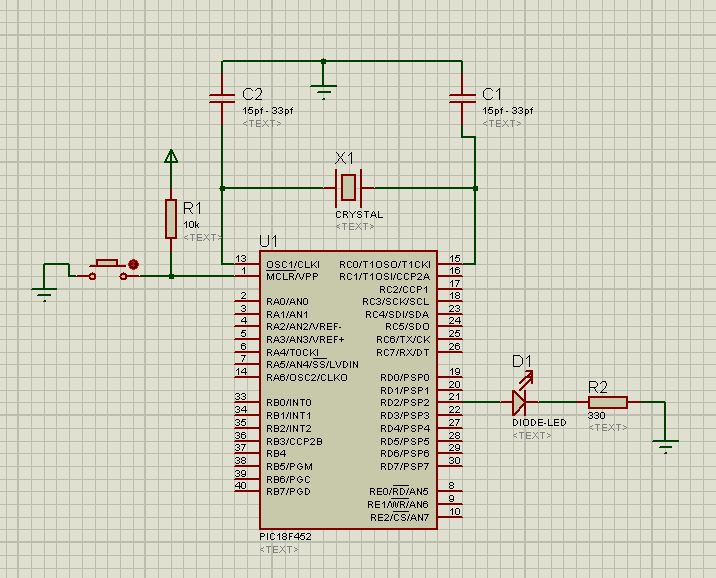
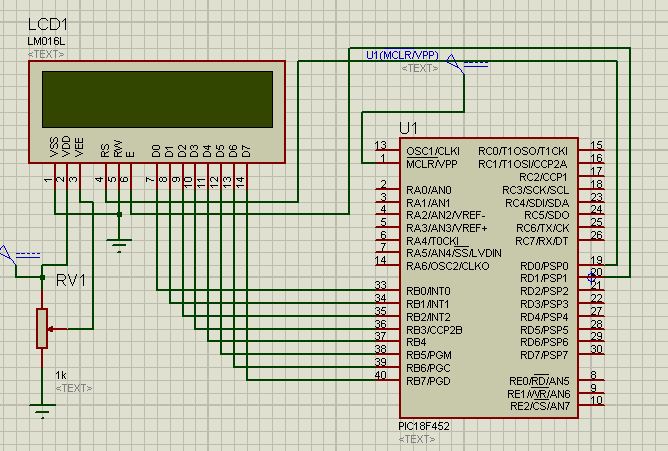
1-خرید یک میکروکنترولر نسل 18f ، مثلا من با 18f452 کار می کنم
2-دانلود ادیتور MPLABX ، لطفا خساست برای حجم تقریبی 350 مگابایتش نکنین :eek:و بخواین از زیر دانلود کردنش شونه خالی کنین این ادیتور نسبت به قبلی ها کلی پیشرفت و امکانات داره و تا دانلودش نکنین متوجه مزایاش نمی شن
از این آدرس می تونین دانلود کنین
http://ww1.microchip.com/downloads/m...-installer.exe
حالا نوبت کامپایلر داده هاتون می رسه ، چون از نسل 18f استفاده می کنین باید mplabc18 رو دانلود کنین که لینک دانلود در زیر قرار گرفته هست
http://www.microchip.com/stellent/id...cName=en010014
MPLAB® C Compiler for PIC18 MCUs (C18)
MPLAB® X Integrated Development Environment (IDE)
با اجازه استادbaby_1، دارم ویرایش میکنم.(شاهرخ مستقیمی)
لینک دانلود MPLABX IDE 2.05 در هفت بخش 49مگابایتی و یک قسمت 18مگابایت:
Part1
Part2
Part3
Part4
Part5
Part6
Part7
Part8
حالا بعد از نصب دو فایل بالا برنامه رو اجرا می کنیم
نمای ابتدایی برنامه در هنگام لود کردن

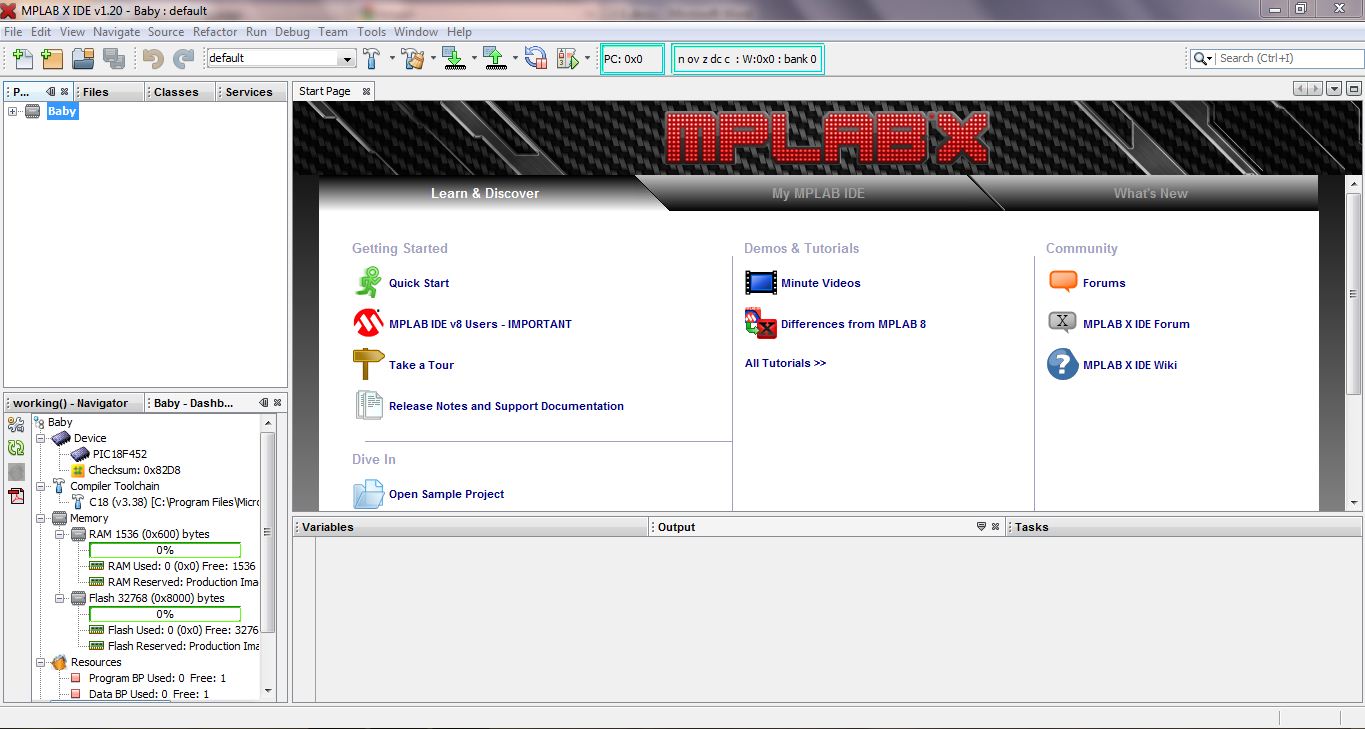
اجرا شدن کلی برنامه
برای ایجاد یک پروژه جدید اقدام می کنیم
مسیر زیر رو دنبال کنین
File->New Project
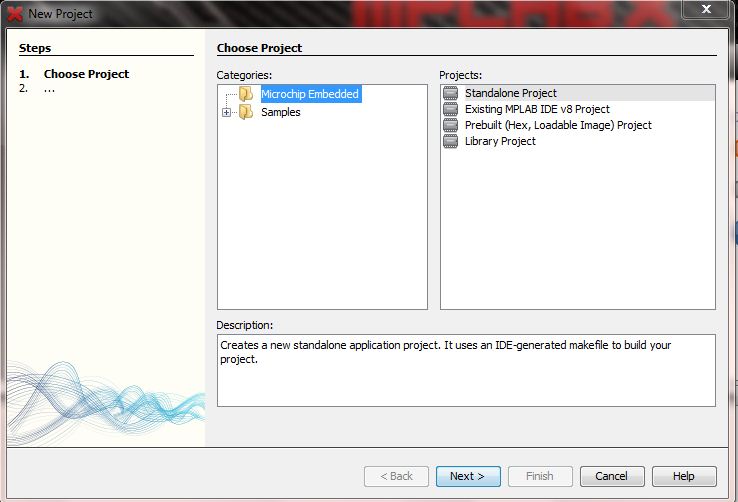
در صفحه باز شده مشخصات رو به همین نحو نگه می داریم و بر روی دکمه Next کلیک می کنیم
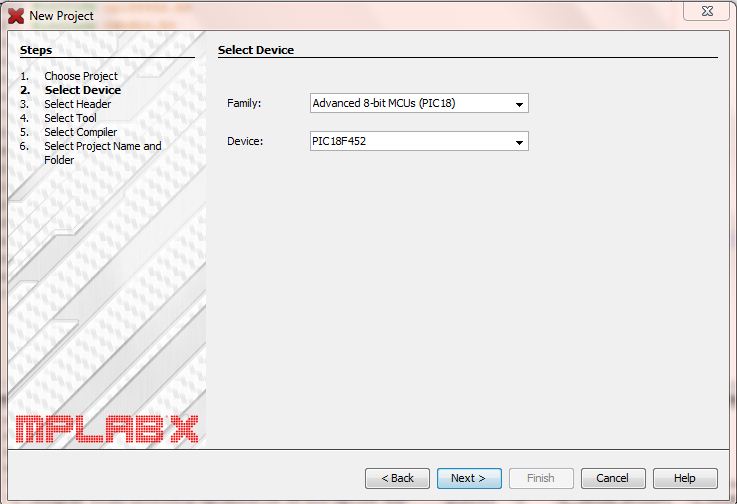
در این قسمت هم در بخش Family گزینه Advanced 8-bit MCUs (PIC18) رو انتخاب می کنیم و از قسمت Device اسم تراشمون رو انتخاب می کنیم که من PIC18f452 رو انتخاب کردم بازم دکمه Next
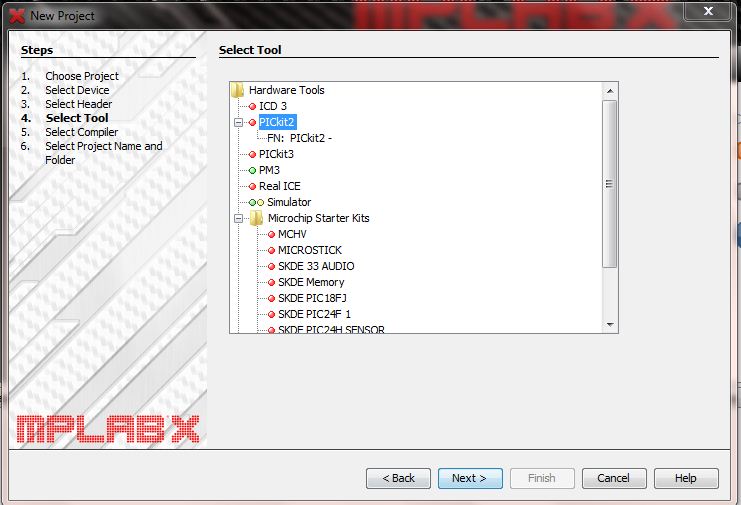
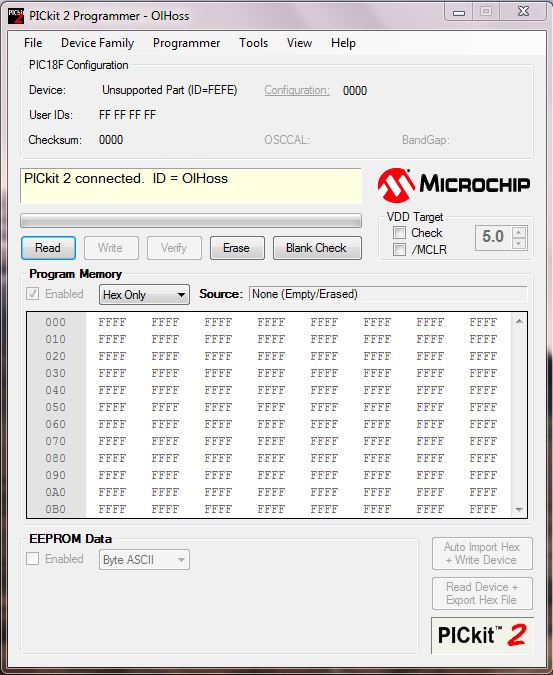
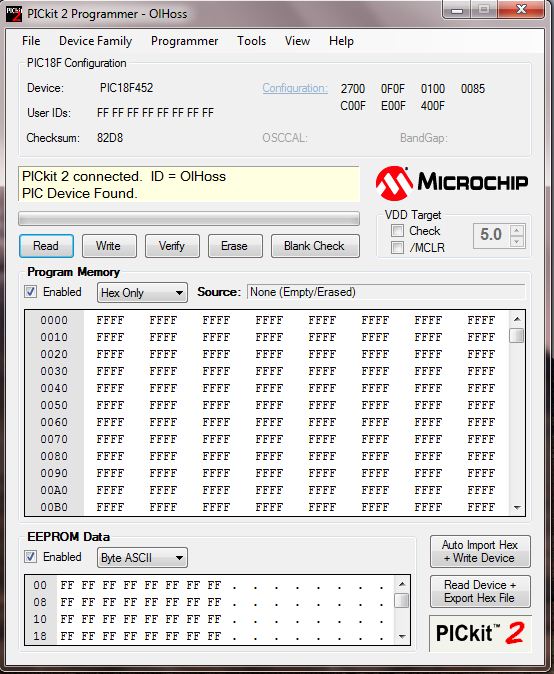
در این قسمت هم می تونین پروگرمر و شبیه سازتون رو مشخص کنین که چون پروگرمر من PICkit هست اون رو انتخاب کردم البته این قسمت هم اگر پروگرمری یا شبیه سازی ندارین مهم نیست شما هم همون PICkit یا ICD3 رو انتخاب کنین و NEXT
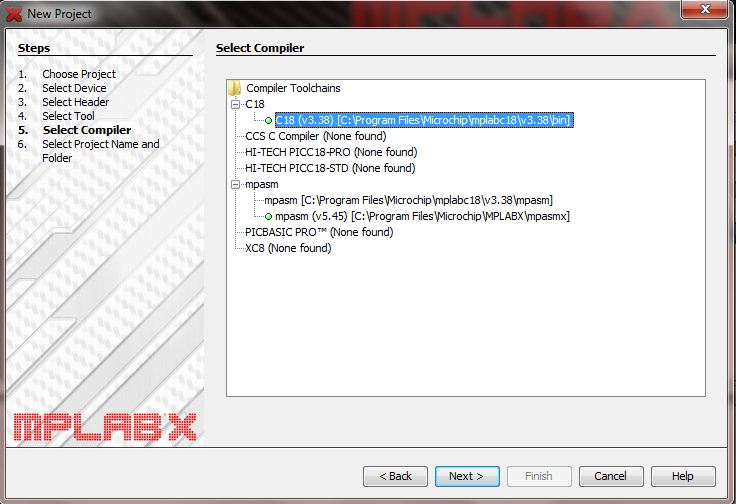
در این قسمت هم باید نوع کامپایلرتون رو مشخص کنین که چون با C18 کار می کنیم پس همین رو انتخاب کرده و سپس NEXT
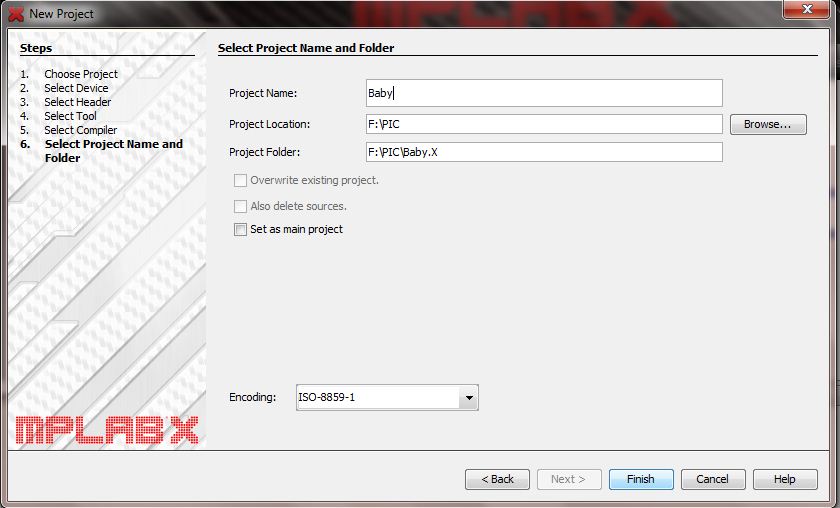
در پنجره آخری هم باید اسم پروژه و مکان ذخیره سازی فایلتون رو مشخص کنین و تیک گزینه Set as main project هم فعال کنین تا اگر چندین پروژه داشته باشین این پروژه رو براتون کامپایلر کامپایل کنه.
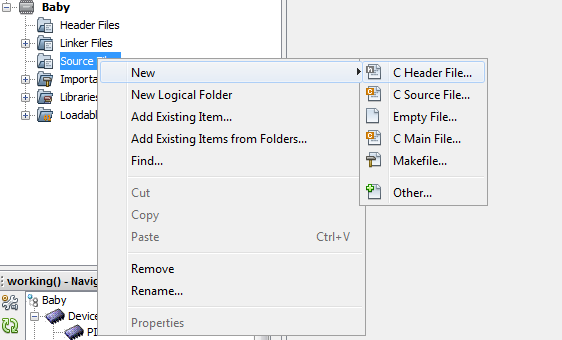
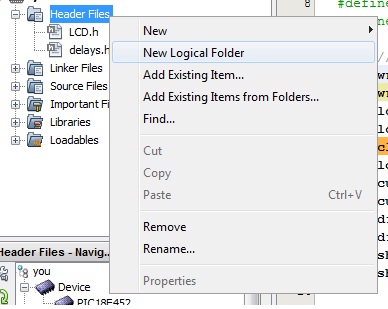
پروژه خودتون رو در قسمت سمت چپ ادیتور MPLAB انتخاب و بر روی گزینه Source Files کلیک کرده و سپس مانند عکس گزینه C Source file رو انتخاب کنین.
در پنجره باز شده اسمی دلخواه برای فایلتون تایپ کرده و سپس دکمه Finish رو کلیک کنین تا یک محیط به اسم انتخابی برای تایپ کردن کدهاتون پدید بیاد.
سلام
ان شالله از امروز به بعد می خوایم با هم میکرو PIC رو توسط کامپایلر MPLAB و زبان برنامه نویسی C شروع کنیم. این شرکت (میکروچیپ) در کمتر از چندین سال از تمامی رقیب ها پیشی گرفت و الان اولین و بهترین میکروکنترولر دنیا محسوب می شه (در میکروکنترولر های 8 بیتی و 16 بیتی).من هم چون قدرت خانواده 18f رو نسبت به بقیه مناسب دیدم و رفرنسهای مناسبی هم پیدا کردم فوکس خودم رو روی این نسل بیشتر می کنم و امیدوارم بتونیم بیشتر از دانش هم استفاده کنیم.
مراحل کار:
1-خرید یک میکروکنترولر نسل 18f ، مثلا من با 18f452 کار می کنم
2-دانلود ادیتور MPLABX ، لطفا خساست برای حجم تقریبی 350 مگابایتش نکنین :eek:و بخواین از زیر دانلود کردنش شونه خالی کنین این ادیتور نسبت به قبلی ها کلی پیشرفت و امکانات داره و تا دانلودش نکنین متوجه مزایاش نمی شن
از این آدرس می تونین دانلود کنین
http://ww1.microchip.com/downloads/m...-installer.exe
حالا نوبت کامپایلر داده هاتون می رسه ، چون از نسل 18f استفاده می کنین باید mplabc18 رو دانلود کنین که لینک دانلود در زیر قرار گرفته هست
http://www.microchip.com/stellent/id...cName=en010014
MPLAB® C Compiler for PIC18 MCUs (C18)
MPLAB® X Integrated Development Environment (IDE)
با اجازه استادbaby_1، دارم ویرایش میکنم.(شاهرخ مستقیمی)
لینک دانلود MPLABX IDE 2.05 در هفت بخش 49مگابایتی و یک قسمت 18مگابایت:
Part1
Part2
Part3
Part4
Part5
Part6
Part7
Part8
حالا بعد از نصب دو فایل بالا برنامه رو اجرا می کنیم
نمای ابتدایی برنامه در هنگام لود کردن
اجرا شدن کلی برنامه
برای ایجاد یک پروژه جدید اقدام می کنیم
مسیر زیر رو دنبال کنین
File->New Project
در صفحه باز شده مشخصات رو به همین نحو نگه می داریم و بر روی دکمه Next کلیک می کنیم
در این قسمت هم در بخش Family گزینه Advanced 8-bit MCUs (PIC18) رو انتخاب می کنیم و از قسمت Device اسم تراشمون رو انتخاب می کنیم که من PIC18f452 رو انتخاب کردم بازم دکمه Next
در این قسمت هم می تونین پروگرمر و شبیه سازتون رو مشخص کنین که چون پروگرمر من PICkit هست اون رو انتخاب کردم البته این قسمت هم اگر پروگرمری یا شبیه سازی ندارین مهم نیست شما هم همون PICkit یا ICD3 رو انتخاب کنین و NEXT
در این قسمت هم باید نوع کامپایلرتون رو مشخص کنین که چون با C18 کار می کنیم پس همین رو انتخاب کرده و سپس NEXT
در پنجره آخری هم باید اسم پروژه و مکان ذخیره سازی فایلتون رو مشخص کنین و تیک گزینه Set as main project هم فعال کنین تا اگر چندین پروژه داشته باشین این پروژه رو براتون کامپایلر کامپایل کنه.
پروژه خودتون رو در قسمت سمت چپ ادیتور MPLAB انتخاب و بر روی گزینه Source Files کلیک کرده و سپس مانند عکس گزینه C Source file رو انتخاب کنین.
در پنجره باز شده اسمی دلخواه برای فایلتون تایپ کرده و سپس دکمه Finish رو کلیک کنین تا یک محیط به اسم انتخابی برای تایپ کردن کدهاتون پدید بیاد.






 ;
;




دیدگاه