سلام
باید نسبت به وزن رباتت و شتاب و سرعتی که میخوا رباتت داشته باشه گشتاور موتور هات رو بدست بیاری. حالا بسته به ولتاژی که داری ولتاژ موتورهات رو هم انتخاب میکنی و بعد از اون از بازار یه موتور نزدیک به محاسباتت میخری
برای مسیریاب انکودر لازم نیست
برای ربات مسیر یاب میتونی از pwm استفاده کنی و هیچ نیازی هم به انکدر نیست
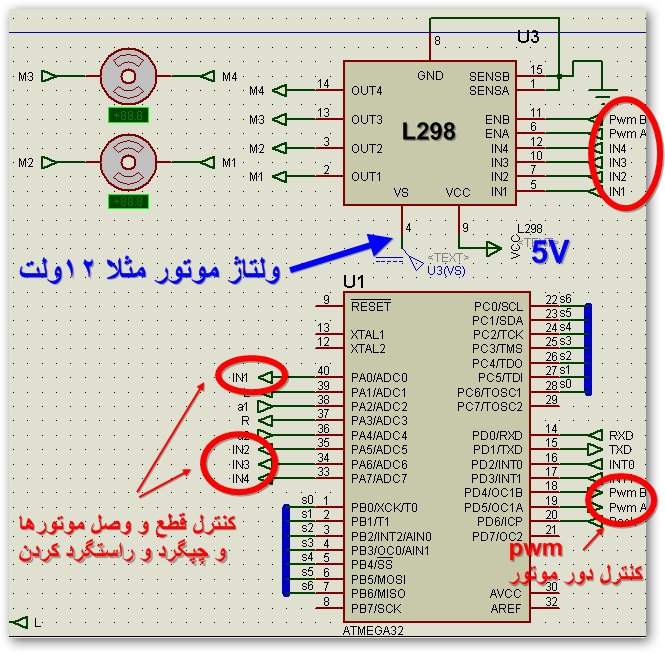
برای مثال توی برنامه pwm از 0 تا 1024 رو به 0 تا 5 ولت تقسیم بندی میکنه و تو میتونی با کم و زیاد کردن 0 تا 1024 ولتاژ مورد نظر رو بدی به موتور
خب حالا مثلا موتورت 12 ولت هست باید چیکار کنی ؟ باید یه ای سی درایور L298 بزاری و pwm رو بدی به پایه مربوطه این ای سی. در ضمن این ای سی و میکرو ATMEGA32 دو تا pwm دارند که برای ربات که معمولا دو تا موتور داره عالیه . اگه سوالی بود بازم در خدمتیم :read:
حالا چه نوع موتوری بخری من خودم rpm300 و ولتاژ 6 گرفتم برای یه ربات 30 در 15 سانتی متر که سبک هم بود یادم یه باطری 12 ولت بستیم زیرش دیگه نمیتونست راه بره :mrgreen:
سلام
باید نسبت به وزن رباتت و شتاب و سرعتی که میخوا رباتت داشته باشه گشتاور موتور هات رو بدست بیاری. حالا بسته به ولتاژی که داری ولتاژ موتورهات رو هم انتخاب میکنی و بعد از اون از بازار یه موتور نزدیک به محاسباتت میخری
برای مسیریاب انکودر لازم نیست
میسه بگین این محاسبات چی هستند وچه جوری باید حساب کرد؟





دیدگاه