

با سلام از دوستان عزیز اگر کسی در رابطه با برنامه ی ربات مسیریاب هنگام عبور کردن از زاویه 90 و 120 درجه چی چزی میدونه لطفا راهنماییم کنه .خواهشا به خاطر این که با زبان کدویژن کار میکنم شما هم با همین زبان راهنماییم کنید...... در ضمن من در حال نوشتن برنامه میانگین سنسورها هستم وبا توجه به میانگینی که روی سنسورها می افتد جهت حرکت را مشخص میکنم اما ربات در زاویه 90 و120 خیلی بد میره
-
اگر تنهاترین تنها شوم باز هم خدا هست.(شهید چمران) -
پاسخ : مشکل برنامه رد کردن زاویه 90 و 120 درجه ربات مسیریاب
برای رد کردن این پیچ ها بهتره یه چرخ معکوس بچرخه تا روباتت بهتر بتونه بپیچه
به عبارتی باید درجا دور بزنهگفت که دیوانه نهی لایق این خانه نهی -
پاسخ : مشکل برنامه رد کردن زاویه 90 و 120 درجه ربات مسیریاب
همین کارو میکنم اما مشکل من برنامه نویسیه سنسور ها روی خط قرار می گیرند ولی عکس العمل نشون نمیده اما در زاویه 30 درجه خوب کار میکنه
اگر تنهاترین تنها شوم باز هم خدا هست.(شهید چمران)دیدگاه
-
پاسخ : مشکل برنامه رد کردن زاویه 90 و 120 درجه ربات مسیریاب
سلام
حتما برنامه رو زیاد جالب ننوشتی
-اول دقیقا حالت چینش سنسور هات با اندازه واقعی رو رو یک شیشه یا طلق بکش
-بعد رو زمین با چسب برق زاویه 90درجه رو درست کن
-اون شیشه یا طلق رو بزار رو خط...ببین رو خط چه سنسور هایی دید دارند
همون ها رو براش تو برنامه تعریف کن
از همین روش میتونی برای تمامی خط ها و زاویه ها و تله های میز استفاده کنی
من واسه ربات خودم که 24تا سنسور داشت همین کارو کردم و خوب هم جواب گرفتم
برای اینکه بهتر درک کنی یه طرح ساده ای کشیدم بهتر متوجه بشید:
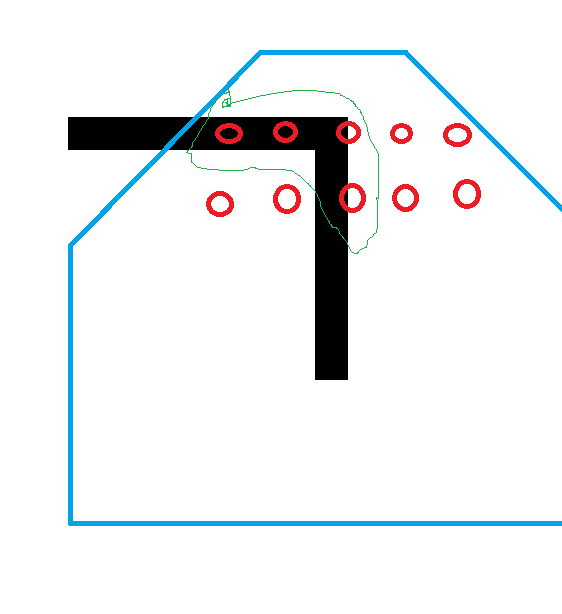
موفق باشید
هنگامي که چيزي مينويسي، کاري نکن تنها کسي که از مغزش استفاده کرده باشد ،مدادت باشد .

\|/_\/_دیدگاه
-
پاسخ : مشکل برنامه رد کردن زاویه 90 و 120 درجه ربات مسیریاب
برنامه ای که براش نوشتم به صورت میانگینه
یعنی میانگین تعداد سنسورهایی که خط را می بینند را به دست می اره بعد از این که مشخص شد کجا میفتده میانگین دستور بهش میدم به عبارت دیگر من با میانگینشون کار میکنم نه خود سنسورها
اگر تنهاترین تنها شوم باز هم خدا هست.(شهید چمران)دیدگاه
-
پاسخ : مشکل برنامه رد کردن زاویه 90 و 120 درجه ربات مسیریاب
پس روشت رو عوض کن تا از حرکت ربات جواب درست بگیرینوشته اصلی توسط RunY
روش پیشنهادیم خوبه و بدون خطاهنگامي که چيزي مينويسي، کاري نکن تنها کسي که از مغزش استفاده کرده باشد ،مدادت باشد .
\|/_\/_دیدگاه
-
پاسخ : مشکل برنامه رد کردن زاویه 90 و 120 درجه ربات مسیریاب
آقا مهران ،میتونی یه برنامه نسبتا کامل 13 سنسوری برام بفرستی تا از روی اون الگو بگیرم . 13 سنسور من به صورت خطی هستند. ممنون میشماگر تنهاترین تنها شوم باز هم خدا هست.(شهید چمران)دیدگاه
-
پاسخ : مشکل برنامه رد کردن زاویه 90 و 120 درجه ربات مسیریاب
نه دوست عزیزنوشته اصلی توسط RunY
متاسفانه الان وقت کافی ندارم
درحال طراحی و ساخت یک پروژه خیلی سنگین هستم که مدار به صورت بیسیم با pc و بالعکس برای کنترل مکانی ارتباط داره و....
فقط یک تجربه خدمت شما عرض کنم
-اصلا سنسور ها رو خطی نچین
-از دو ردیف سنسور استفاده کن
به صورت ^ بچینی بهتره و زاویه ها رو بهتر رد میکنه
هنگامي که چيزي مينويسي، کاري نکن تنها کسي که از مغزش استفاده کرده باشد ،مدادت باشد .
\|/_\/_دیدگاه



دیدگاه