

آموزش CooCox CoIDE جهت برنامه نویسی میکروکنترلر های Cortex-M4
این تاپیک برای مبتدی ها می باشد. در صورتی که چیزی می دانید لطفا ادامه ندهید چون فقط وقت شمار را تلف می کند
میکروکنترلر های سری Cortex-M4
همان طور که می دانید میکروکنترلر های 8051 - AVR - PIC - ... دیگر منسوخ شده اند و امروزه از Cortex-M4 استفاده می شود.
Cortex-M4 توسط شرکت های مختلفی تولید می شود از جمله شرکت های زیر
Atmel - Energy Micro - Freescale - Holtek - NXP - Nuvoton - ST - TI - Toshiba
تو ایران شرکت Atmel پر فروش ترین شرکت سازنده میکرو هست که تمام چیز هایی که تو انبار دارد و مشتری ندارد را به ایران می فرستد
تو جهان Freescale پرفروش ترین شرکت میکرو ساز است
NXP بعد از تحریم ها تو ایران جا باز کرد و بعد از Atmel پرفروش ترین شرکت در بازار ایران است
شرکت ST هم چون اروپایی است تحت تاثیر تحریم کمتر واقع شده است
چون تمام این شرکت ها میکروکنترلر Cortex-M4 می سازند برنامه نویسی مشابه داند. اما برنامه نویسی آن ها یکیان نیست. تقریبا 90 کد ها یکسان است. آن اختلاف کم هم می شود با جند روز کار کردن جبران نمود.
با توجه به امکانات در این تاپیک میکروکنترلر های شرکت ST خانواده ی STM32F4 برنامه نوشته می شود و قابل تعمیم به سایر شرکت ها است.
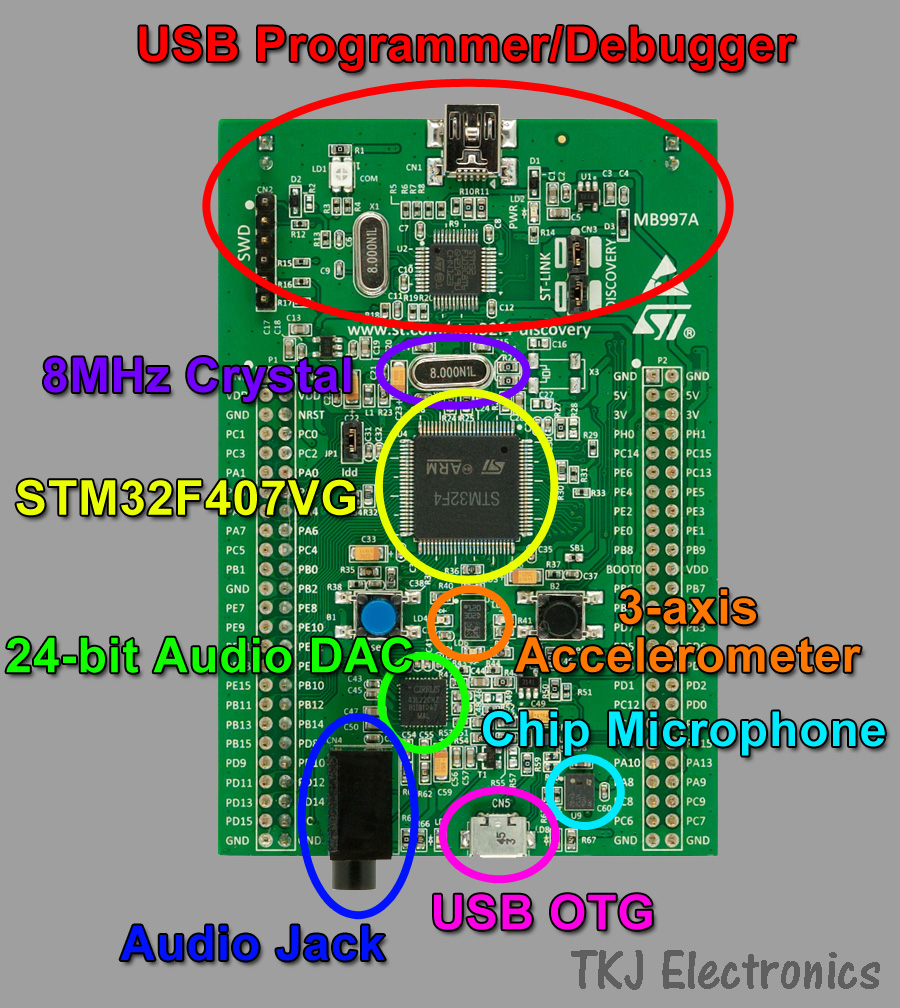
چون این تاپیک برای مبتدی ها می باشد لازم است سخت افزاری معرفی کنیم تا ابتدا با خیال راحت کدنویسی آن را یاد بگیرند و سپس وارد مدارات جانبی آن شوند. سخت افزار های زیاد در بازار وجود دارد اما ما در این جا سخت افزاری معرفی می کنیم که در بازار ایران در دسترس باشد. اگر شما تا به حال با میکرو های دیگر کار کردید و می دانید سخت افزار را چگونه ببنید لازم نیست این برد را تهیه نماید. بنابراین به عنوان یک مبتدی و برای شروع برد زیر را تهیه نمایید:
Discovery kit for STM32 F4 series
کافی است به بازار مراجعه کنید یا در گوگل متن فوق را جست و جو کنید و آن را به صورت اینترنتی خریداری نمایید. چندین شرکت در ایران این برد را می فروشند و چون قصد تبلیغت نداریم از آن ها اسمی به میان نمی آوریم.
IDE & compiler & debugger
IDE مخفف Integrated Development Environment به معنی «محیط یکپارچه توسعه نرمآافزار» است. در واقع محیطی است که کاربر در آن برنامه می نوسید. در بین مبتدی ها اشتباها به کامپایلر معرف است !
چهار IDE معروف به شرح زیرند:
Keil
IAR
MikroC
CooCox CoIDE
البته نرم افزار های دیگری نیز وجود دارد که کمتر مورد استفاده قرار می گیرند. در بین چهار نمر افزار فوق، سه تای اول پولی هستند و برای آن یا باید پول زیادی بدهید و یا آن ها را کرک نمایید. نرم افزار Keil در بین ایرانی ها محبوبیت بیشتری دارد. نرم افزار IAR در بین ایرانی هایی که با میکروکنترلر های 8051 برنامه می نوشتند محبوبیت دارد. نرم افزار MikroC بین ایرانی هایی که با میکروکنترلر های PIC کار می کردند طرفدار دارد. اما در این تاپیک ما راه دیگر، یعنی نرم افزار رایگان را انتخاب می کنیم.
کامپایلر نمر افزار است که کد شما را از یک زبان به زبان دیگری تبدیل می کند. در این جا کد شما از زبان سی یا سی پلاس پلاس یا هر زبان دیگری به زبان ماشین (هگز) تبدیل می شود. محیط یکپارچه توسعه نرمآافزار CooCox CoIDE به شما این اجازه را می دهد که از کامپایلر های متفاوتی استفاده نمیاید. ما در این جا از کامپایلر رایگان GCC استفاده می کنیم.
ادامه در پست های آتی
این تاپیک برای مبتدی ها می باشد. در صورتی که چیزی می دانید لطفا ادامه ندهید چون فقط وقت شمار را تلف می کند
میکروکنترلر های سری Cortex-M4
همان طور که می دانید میکروکنترلر های 8051 - AVR - PIC - ... دیگر منسوخ شده اند و امروزه از Cortex-M4 استفاده می شود.
Cortex-M4 توسط شرکت های مختلفی تولید می شود از جمله شرکت های زیر
Atmel - Energy Micro - Freescale - Holtek - NXP - Nuvoton - ST - TI - Toshiba
تو ایران شرکت Atmel پر فروش ترین شرکت سازنده میکرو هست که تمام چیز هایی که تو انبار دارد و مشتری ندارد را به ایران می فرستد
تو جهان Freescale پرفروش ترین شرکت میکرو ساز است
NXP بعد از تحریم ها تو ایران جا باز کرد و بعد از Atmel پرفروش ترین شرکت در بازار ایران است
شرکت ST هم چون اروپایی است تحت تاثیر تحریم کمتر واقع شده است
چون تمام این شرکت ها میکروکنترلر Cortex-M4 می سازند برنامه نویسی مشابه داند. اما برنامه نویسی آن ها یکیان نیست. تقریبا 90 کد ها یکسان است. آن اختلاف کم هم می شود با جند روز کار کردن جبران نمود.
با توجه به امکانات در این تاپیک میکروکنترلر های شرکت ST خانواده ی STM32F4 برنامه نوشته می شود و قابل تعمیم به سایر شرکت ها است.
چون این تاپیک برای مبتدی ها می باشد لازم است سخت افزاری معرفی کنیم تا ابتدا با خیال راحت کدنویسی آن را یاد بگیرند و سپس وارد مدارات جانبی آن شوند. سخت افزار های زیاد در بازار وجود دارد اما ما در این جا سخت افزاری معرفی می کنیم که در بازار ایران در دسترس باشد. اگر شما تا به حال با میکرو های دیگر کار کردید و می دانید سخت افزار را چگونه ببنید لازم نیست این برد را تهیه نماید. بنابراین به عنوان یک مبتدی و برای شروع برد زیر را تهیه نمایید:
Discovery kit for STM32 F4 series
کافی است به بازار مراجعه کنید یا در گوگل متن فوق را جست و جو کنید و آن را به صورت اینترنتی خریداری نمایید. چندین شرکت در ایران این برد را می فروشند و چون قصد تبلیغت نداریم از آن ها اسمی به میان نمی آوریم.
IDE & compiler & debugger
IDE مخفف Integrated Development Environment به معنی «محیط یکپارچه توسعه نرمآافزار» است. در واقع محیطی است که کاربر در آن برنامه می نوسید. در بین مبتدی ها اشتباها به کامپایلر معرف است !
چهار IDE معروف به شرح زیرند:
Keil
IAR
MikroC
CooCox CoIDE
البته نرم افزار های دیگری نیز وجود دارد که کمتر مورد استفاده قرار می گیرند. در بین چهار نمر افزار فوق، سه تای اول پولی هستند و برای آن یا باید پول زیادی بدهید و یا آن ها را کرک نمایید. نرم افزار Keil در بین ایرانی ها محبوبیت بیشتری دارد. نرم افزار IAR در بین ایرانی هایی که با میکروکنترلر های 8051 برنامه می نوشتند محبوبیت دارد. نرم افزار MikroC بین ایرانی هایی که با میکروکنترلر های PIC کار می کردند طرفدار دارد. اما در این تاپیک ما راه دیگر، یعنی نرم افزار رایگان را انتخاب می کنیم.
کامپایلر نمر افزار است که کد شما را از یک زبان به زبان دیگری تبدیل می کند. در این جا کد شما از زبان سی یا سی پلاس پلاس یا هر زبان دیگری به زبان ماشین (هگز) تبدیل می شود. محیط یکپارچه توسعه نرمآافزار CooCox CoIDE به شما این اجازه را می دهد که از کامپایلر های متفاوتی استفاده نمیاید. ما در این جا از کامپایلر رایگان GCC استفاده می کنیم.
ادامه در پست های آتی







دیدگاه