


سلام دوستان عزیز و گرامی
از امروز می خوام شما رو با ساخت یک دو چرخه و یک اتومبیل الکترونیکی آشنا کنم. ساخت این گونه لوازم به علوم روز دنیا نیاز دارد و مطالب بسیار زیاد و پیچیده هستند. علاوه بر اینکه منابع زیادی در دسترس نیست هزینه های بسیار بسیار زیادی هم در بر دارد که مشکل یادگیری این علوم را سخت تر می کند .
این گونه پروژه ها در کشور های مختلف جز پروژه های روز دنیاست و بسیار جالب و لذت بخش و کاربردی می باشد.
من به همراه جمعی از دوستانم در دانشگاه شیراز به کمک اساتید محترم دانشگاه شیراز و همچنین اساتید محترم و دوستان گرامی فارغ التحصیل هنرستان نمونه دولتی آزادی فلسطین تهران روی این پروژه کار می کنیم شما هم با ما همراه باشید و از آزمایش های ما و این مطالب زیبا لذت ببرید. ما در این پروژه با هاب موتور ها و موتور های براش لس دی سی ، سوپر خازن ها ، کنترل توان و بازیابی انرژی ، شارژرها و باتری ها و . . . سروکار داریم. و مطالب مفید زیادی رو خواهیم گفت.
به امید روزی که از شر اتوموبیل های سوخت فسیلی خلاص شویم و با داشتن تکنولوژی روز دنیا به شهری پاک قدم نهیم.
در ضمن بخش سوال و جواب نیز در این تا پیک قرار گرفت که می توانید سوالات و نظرات و مطالب خود را در آنجا مطرح کنید تا این تاپیک فقط مختص توضیحات بماند.
http://www.eca.ir/forum2/index.php?topic=88184.0

http://www.infineon.com/export/sites/default/media/press/Image/press_photo/ebike_with_Infineon.jpg
از امروز می خوام شما رو با ساخت یک دو چرخه و یک اتومبیل الکترونیکی آشنا کنم. ساخت این گونه لوازم به علوم روز دنیا نیاز دارد و مطالب بسیار زیاد و پیچیده هستند. علاوه بر اینکه منابع زیادی در دسترس نیست هزینه های بسیار بسیار زیادی هم در بر دارد که مشکل یادگیری این علوم را سخت تر می کند .
این گونه پروژه ها در کشور های مختلف جز پروژه های روز دنیاست و بسیار جالب و لذت بخش و کاربردی می باشد.
من به همراه جمعی از دوستانم در دانشگاه شیراز به کمک اساتید محترم دانشگاه شیراز و همچنین اساتید محترم و دوستان گرامی فارغ التحصیل هنرستان نمونه دولتی آزادی فلسطین تهران روی این پروژه کار می کنیم شما هم با ما همراه باشید و از آزمایش های ما و این مطالب زیبا لذت ببرید. ما در این پروژه با هاب موتور ها و موتور های براش لس دی سی ، سوپر خازن ها ، کنترل توان و بازیابی انرژی ، شارژرها و باتری ها و . . . سروکار داریم. و مطالب مفید زیادی رو خواهیم گفت.
به امید روزی که از شر اتوموبیل های سوخت فسیلی خلاص شویم و با داشتن تکنولوژی روز دنیا به شهری پاک قدم نهیم.
در ضمن بخش سوال و جواب نیز در این تا پیک قرار گرفت که می توانید سوالات و نظرات و مطالب خود را در آنجا مطرح کنید تا این تاپیک فقط مختص توضیحات بماند.
http://www.eca.ir/forum2/index.php?topic=88184.0
http://www.infineon.com/export/sites/default/media/press/Image/press_photo/ebike_with_Infineon.jpg









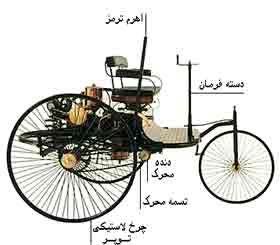
 که میشه با کلید مخصوص دوچرخه رو روشن کرد .
که میشه با کلید مخصوص دوچرخه رو روشن کرد .





 و یک ولتاژ ضد محرکه بوجود می آورد که با ولتاژ اعمالی ما مخالفت می کند زیرا دوست دارد در شرایط پایدار بماند همانند یک جسم و حرکت آن به این قانون اینرسی گفته می شود. اینرسی در یک وسیله ی نقلیه ی الکترونیکی بسیار مفید است و می توان با ذخیره سازی آن مسافت بیشتری را با یک بار شارژ کردن باتری ها پیمود و در مصرف انرژی صرفه جویی کرد. اما مشکل اینجاست که برای شارژ باتری ها زمان نیاز است و ما نمی توانیم انرژی حاصل از ترمز گرفتن یک وسیله نقلیه که باید در زمان کوتاهی ترمز کند را در باتری ذخیره کنیم. اما می توان این انرژی را در سوپر خازن ها ذخیره کرد و از آن استفاده کرد زیرا خازن ها می توانند به سرعت شارژ شوند و اگر مقاومت مسیر بسیار کم باشد با جریان بالا به سرعت شارژ می شوند و می توانند انرژی ترمز را در خود ذخیره کنند. از این انرژی می توان برای شارژ باتری ها استفاده کرد . یا هنگامی که اتوموبیل الکترونیکی می خواهد شروع به حرکت کند این انرژی به کمک باتری ها می آید و انرژی زیادی برای شروع حرکت به موتور اعمال می شود و با این کار باتری ها کارآمد تر می شوند و مدت زمان بیشتری کار می کنند و عمر آنها افزایش پیدا می کند.
و یک ولتاژ ضد محرکه بوجود می آورد که با ولتاژ اعمالی ما مخالفت می کند زیرا دوست دارد در شرایط پایدار بماند همانند یک جسم و حرکت آن به این قانون اینرسی گفته می شود. اینرسی در یک وسیله ی نقلیه ی الکترونیکی بسیار مفید است و می توان با ذخیره سازی آن مسافت بیشتری را با یک بار شارژ کردن باتری ها پیمود و در مصرف انرژی صرفه جویی کرد. اما مشکل اینجاست که برای شارژ باتری ها زمان نیاز است و ما نمی توانیم انرژی حاصل از ترمز گرفتن یک وسیله نقلیه که باید در زمان کوتاهی ترمز کند را در باتری ذخیره کنیم. اما می توان این انرژی را در سوپر خازن ها ذخیره کرد و از آن استفاده کرد زیرا خازن ها می توانند به سرعت شارژ شوند و اگر مقاومت مسیر بسیار کم باشد با جریان بالا به سرعت شارژ می شوند و می توانند انرژی ترمز را در خود ذخیره کنند. از این انرژی می توان برای شارژ باتری ها استفاده کرد . یا هنگامی که اتوموبیل الکترونیکی می خواهد شروع به حرکت کند این انرژی به کمک باتری ها می آید و انرژی زیادی برای شروع حرکت به موتور اعمال می شود و با این کار باتری ها کارآمد تر می شوند و مدت زمان بیشتری کار می کنند و عمر آنها افزایش پیدا می کند. 









دیدگاه