

ماجرا از اونجا شروع شد که من میخوام یک الکترو موتور سه فاز قفس سنجابی ارزون قیمت رو به یک سروو موتور AC گرون قیمت تبدیل کنم . از نظر ریالی ارزش افزوده مستقیم این کار حداقل 15 برابر است ( الکترو موتور 100 هزار تومنی به سروو 1.5 میلیون تومنی تبدیل میشه) . ولی از لحاظ فنی و از لحاظ خودکفایی ارزش این کار بی نهایت است . البته این رو هم بگم که به هر حال ساختار سروو موتور ac با موتور القایی قفسه سنجابی متفاوته . و کلا موتور القایی برای کار در فرکانس مشخصی طراحی شده است . و اگر موتور القایی به سروو موتور تبدیل بشه موقع بارکشیدن در سرعت های پایین یک صدای زنگ - زنگوله مانندی تولید میکنه . که اصلا برای من مهم نیست .
القصه
برای این کار باید یک سیستم های کنترلی + یک طبقه قدرت تولید کنیم . یعنی هیچ احتیاجی به اختراع و ابتکار و خلاقیت نیست . به عبارت دیگر سیستم کنترلی تبدیل موتور های چند فاز به سروو موتور در دسترس عمومی قرار دارد .و فقط کافیست این سیتم کنترلی را روی یک میکرو حتی روی یک pc با پورت usb پیاده کنیم (یا آی سی های مخصوصی دارند که تهیه کنیم که نظر من بیشتر روی مورد اول است ).من تا قبل این فقط با سیستم ساده pid کار کردم . پیاده سازی یک سیتم pid در یک میکرو کنترلر به راحتی آب خوردن است.
سرتون رو درد نیاورم
میخوام بدون اینکه وارد بحث های بی پایان و بدرد نخور تبدیلات لاپلاس و حوزه فرکانس منفی و ... بشیم با کمک نرم افزار متلب و بکمک خواننده ها و احتمالا جواب دههنده ها اینجا سوالاتمون رو مطرح کنیم تا یک رفرنس حداکثر 20 صفحه ای تهیه کنیم که سیستم های کنترلی رو عین رانی هلو بریزه تو حلق دانش پژوهان
اولین مثال
طراحی سیستم کروز کنترلر ابتدایی
سیستم کروز در ماشین های دنده اوتوماتیک مدل بالا تعبیه میشه تا سرعت ماشین رو در طول جاده ثابت نگه داره . پس ما به یک سیتم کنترلی نیاز داریم تا در ورودی سرعت را بهش بدیم و اون در خروجی نیروی لازم رو لحظه به لحظه محاسبه کنه و به ما بگه و ما با توجه به این نیرو دریچه نازل بنزین رو تغییر بدیم .
[img]http://ctms.engin.umich.edu/CTMS/Content/CruiseControl/********/Modeling/figures/cruise_control_schematic.png[/img]
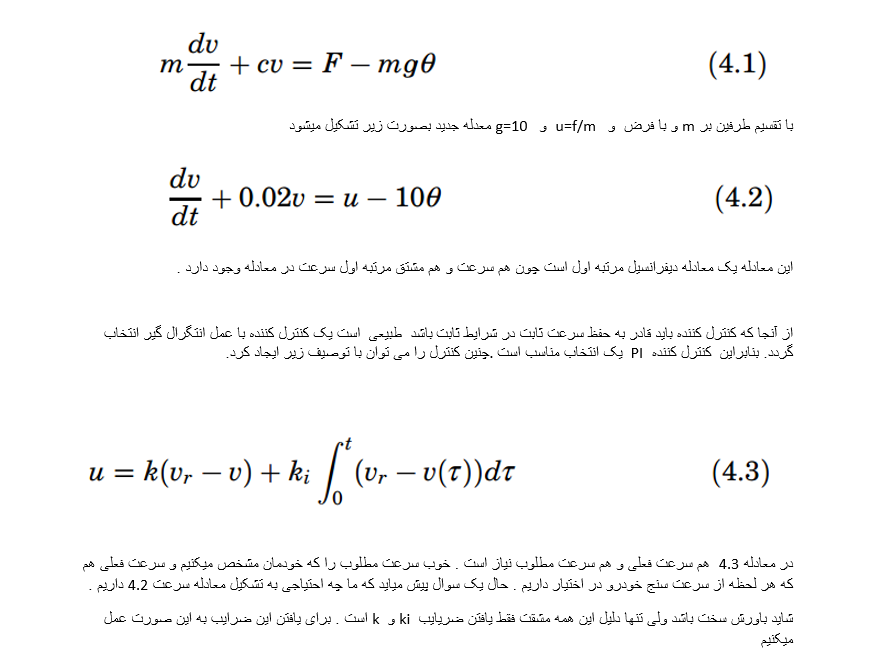
شکل کاملا گویا است با توجه به قانون دوم نیوتن اگر بر جسمی نیروی واردکنیم آن جسم متناسب با جرم شتاب میگیرد و از طرفی سرعت مشتق مکان است و شتاب مشتق سرعت است .
و علاوه بر نیروی موتور چند نیروی مقاوم از جمله اصطحکاک و مقاومت باد و شیب جاده و ... هم وجود داره برای راحتی کار مجموع این ها رو متناسب باسرعت و یک ظریب ساده b یعنی bv در نظر میگیریم .
حالا طرف اومده معادله کروز رو بشکل زیر به زبان شبیه سازی در آورده
[img]http://ctms.engin.umich.edu/CTMS/Content/CruiseControl/********/Modeling/figures/cc004.png[/img]
در این شکل هم کاملا مشخصه که چی به چیه
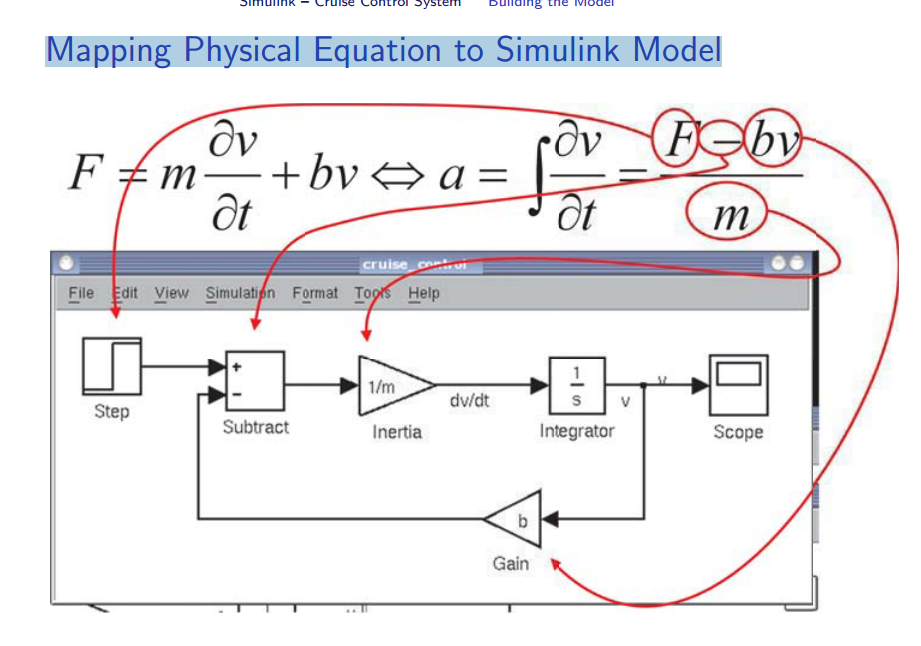
حالا کسی میتونه شکل فوق رو توضیح بده که چرا اینجا برعکس عمل کرده چرا F را به سیتم وارد کرده و v رو از سیستم گرفته در حالی که ما دقیقا دنبال عکس این مطلب هستم
ما می خواهی بدانم برای اینکه سرعت ماشین در 95 کیلومتر ثابت بمونه چقدر نیرو لازمه ؟ نظرتون چیه؟
القصه
برای این کار باید یک سیستم های کنترلی + یک طبقه قدرت تولید کنیم . یعنی هیچ احتیاجی به اختراع و ابتکار و خلاقیت نیست . به عبارت دیگر سیستم کنترلی تبدیل موتور های چند فاز به سروو موتور در دسترس عمومی قرار دارد .و فقط کافیست این سیتم کنترلی را روی یک میکرو حتی روی یک pc با پورت usb پیاده کنیم (یا آی سی های مخصوصی دارند که تهیه کنیم که نظر من بیشتر روی مورد اول است ).من تا قبل این فقط با سیستم ساده pid کار کردم . پیاده سازی یک سیتم pid در یک میکرو کنترلر به راحتی آب خوردن است.
سرتون رو درد نیاورم
میخوام بدون اینکه وارد بحث های بی پایان و بدرد نخور تبدیلات لاپلاس و حوزه فرکانس منفی و ... بشیم با کمک نرم افزار متلب و بکمک خواننده ها و احتمالا جواب دههنده ها اینجا سوالاتمون رو مطرح کنیم تا یک رفرنس حداکثر 20 صفحه ای تهیه کنیم که سیستم های کنترلی رو عین رانی هلو بریزه تو حلق دانش پژوهان
اولین مثال
طراحی سیستم کروز کنترلر ابتدایی
سیستم کروز در ماشین های دنده اوتوماتیک مدل بالا تعبیه میشه تا سرعت ماشین رو در طول جاده ثابت نگه داره . پس ما به یک سیتم کنترلی نیاز داریم تا در ورودی سرعت را بهش بدیم و اون در خروجی نیروی لازم رو لحظه به لحظه محاسبه کنه و به ما بگه و ما با توجه به این نیرو دریچه نازل بنزین رو تغییر بدیم .
[img]http://ctms.engin.umich.edu/CTMS/Content/CruiseControl/********/Modeling/figures/cruise_control_schematic.png[/img]
شکل کاملا گویا است با توجه به قانون دوم نیوتن اگر بر جسمی نیروی واردکنیم آن جسم متناسب با جرم شتاب میگیرد و از طرفی سرعت مشتق مکان است و شتاب مشتق سرعت است .
و علاوه بر نیروی موتور چند نیروی مقاوم از جمله اصطحکاک و مقاومت باد و شیب جاده و ... هم وجود داره برای راحتی کار مجموع این ها رو متناسب باسرعت و یک ظریب ساده b یعنی bv در نظر میگیریم .
حالا طرف اومده معادله کروز رو بشکل زیر به زبان شبیه سازی در آورده
[img]http://ctms.engin.umich.edu/CTMS/Content/CruiseControl/********/Modeling/figures/cc004.png[/img]
در این شکل هم کاملا مشخصه که چی به چیه
حالا کسی میتونه شکل فوق رو توضیح بده که چرا اینجا برعکس عمل کرده چرا F را به سیتم وارد کرده و v رو از سیستم گرفته در حالی که ما دقیقا دنبال عکس این مطلب هستم
ما می خواهی بدانم برای اینکه سرعت ماشین در 95 کیلومتر ثابت بمونه چقدر نیرو لازمه ؟ نظرتون چیه؟







دیدگاه