

سلام دوستان :bye
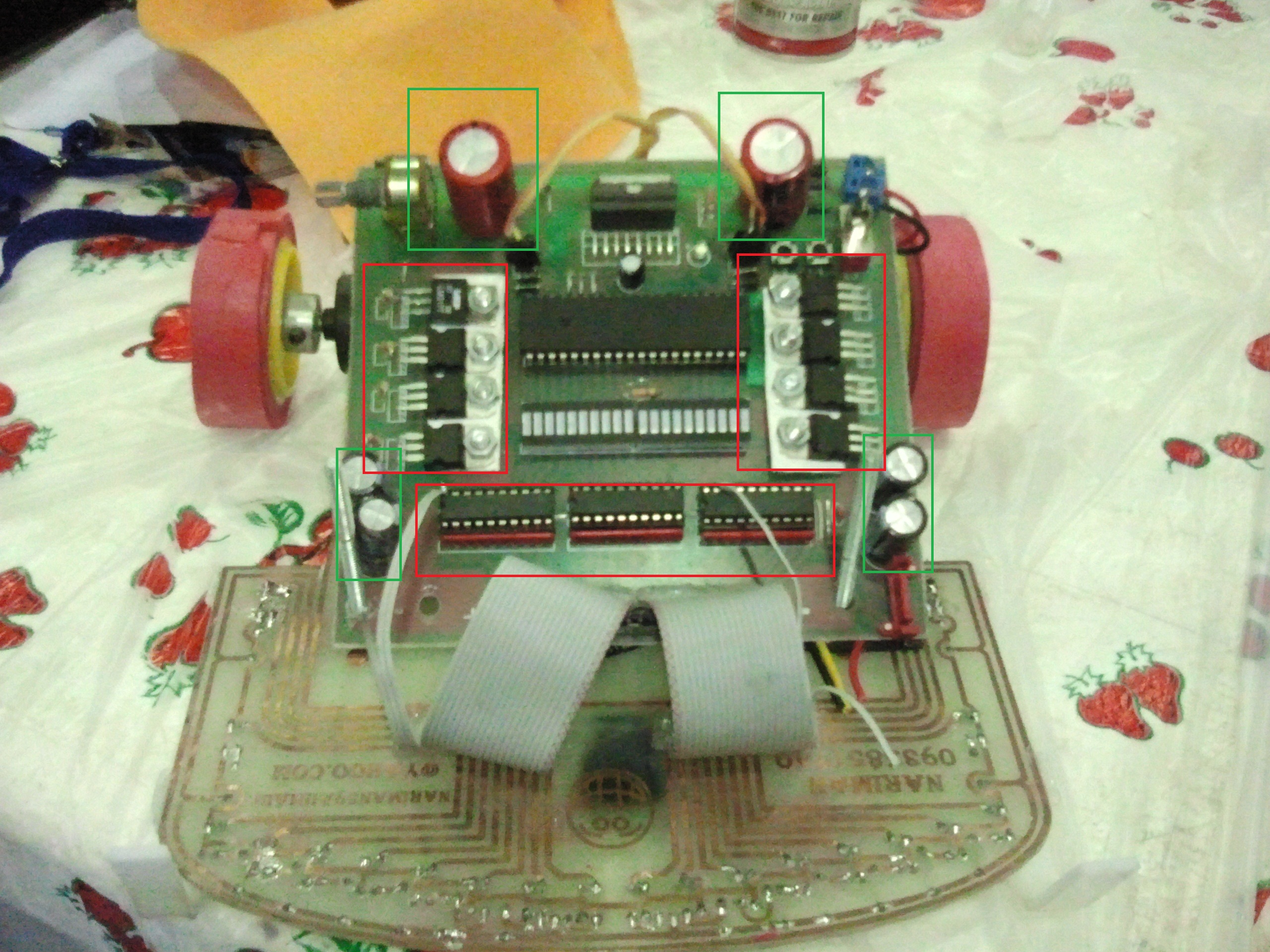
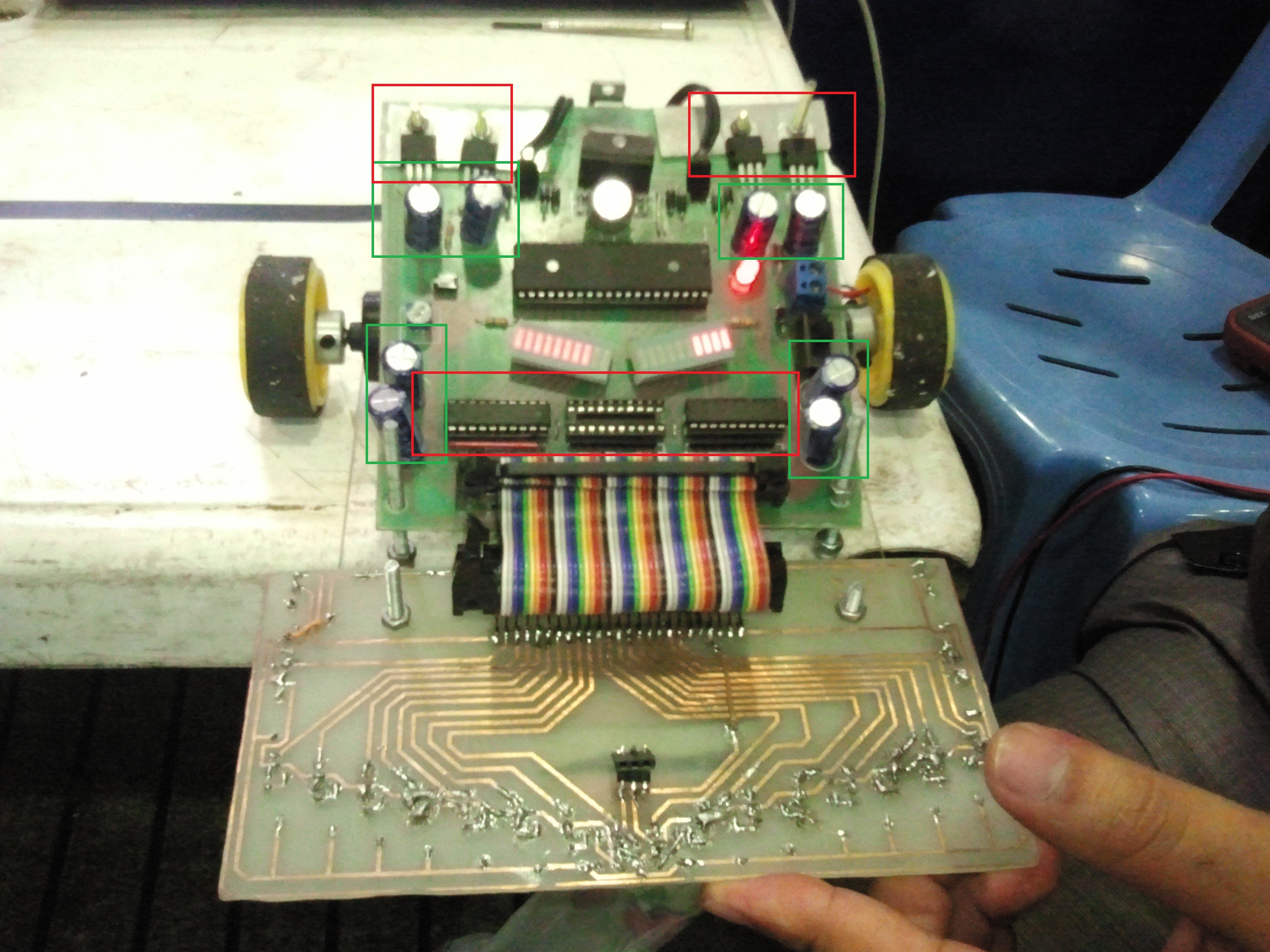
اول از اینکه میشه بگید توی عکس های زیر اونهایی که با قرمز مشخص کردم چی هستند و کارشون چیه؟؟
سوال دوم اینه که اون خازن های گنده اونجا چیکارن
دوستان مشکل بالا حل شد الان چند تا سوال دیگه دارم
برای روبات میخوام از باتری استفاده کنم بنظرتون دو تا موتور 800 دور میتونه وزن این باتریو تحمل کنه؟؟؟
http://roboeq.ir/products/detail/0801005/
اگه نه میتونم از این باتری استفاده کنم ؟؟؟به نظر شما جریان کافی برای یک ساعت روشن بودن دوتا موتور رو میده؟؟؟؟
http://roboeq.ir/products/detail/0801002/
ممنون
http://s4.picofile.com/file/8167594226/Photo0281.jpg
http://s5.picofile.com/file/8167594284/Photo0284.jpg
اول از اینکه میشه بگید توی عکس های زیر اونهایی که با قرمز مشخص کردم چی هستند و کارشون چیه؟؟
سوال دوم اینه که اون خازن های گنده اونجا چیکارن
دوستان مشکل بالا حل شد الان چند تا سوال دیگه دارم
برای روبات میخوام از باتری استفاده کنم بنظرتون دو تا موتور 800 دور میتونه وزن این باتریو تحمل کنه؟؟؟
http://roboeq.ir/products/detail/0801005/
اگه نه میتونم از این باتری استفاده کنم ؟؟؟به نظر شما جریان کافی برای یک ساعت روشن بودن دوتا موتور رو میده؟؟؟؟
http://roboeq.ir/products/detail/0801002/
ممنون
http://s4.picofile.com/file/8167594226/Photo0281.jpg
http://s5.picofile.com/file/8167594284/Photo0284.jpg


 oo:
oo:




 احتمالا برا خوشگلی گذاشته =))
احتمالا برا خوشگلی گذاشته =))


دیدگاه