

سلام
من یه موتور استپر دارم تونستم با میکرو راش بندازم .
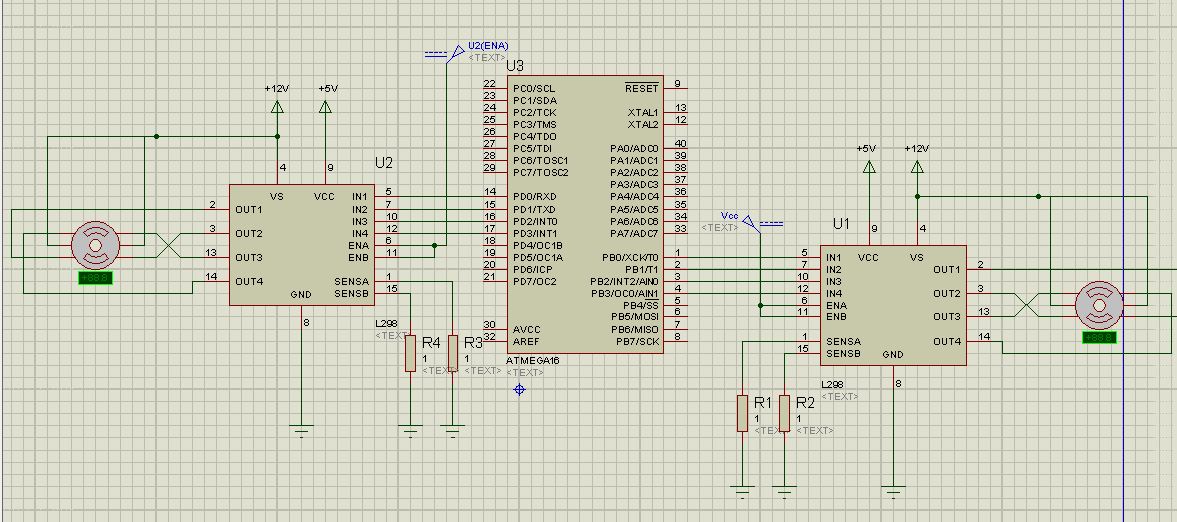
حالا می خوام دو تا موتور استپر رو هم زمان یجا با هم راه بیفته با میکرو avr
با میکرو برنامه نوشتم نشد .
مشکل این جاست که اول سیکل اول در برنامه اجرا میشه بعد میرسه به سیکل بعدی برنامه .......
هیچ راهی نیست که بشه دو تا سیکل رو با هم اجرا کرد >؟؟؟؟؟؟؟؟؟؟؟
نمونه برنامه ای که نوشتم میزارم ...
در واقع می خوام دو تا محور مختصات رو داشته باشم ... مثل محور x y دستگاه cnc دو محوره
من یه موتور استپر دارم تونستم با میکرو راش بندازم .
حالا می خوام دو تا موتور استپر رو هم زمان یجا با هم راه بیفته با میکرو avr
با میکرو برنامه نوشتم نشد .
مشکل این جاست که اول سیکل اول در برنامه اجرا میشه بعد میرسه به سیکل بعدی برنامه .......
هیچ راهی نیست که بشه دو تا سیکل رو با هم اجرا کرد >؟؟؟؟؟؟؟؟؟؟؟
نمونه برنامه ای که نوشتم میزارم ...
در واقع می خوام دو تا محور مختصات رو داشته باشم ... مثل محور x y دستگاه cnc دو محوره
کد:
#include <mega16.h>
#include <delay.h>
int i,j,v,b;
void motor1(){
for(j=1;j<=8;j=j*2)
{
for(i=1;i<=50;i++)
{
PORTB=~j;
delay_ms(1);
}
}
}
void motor2(){
for(v=1;v<=8;v=v*2)
{
for(b=1;b<=100;b++)
{
PORTD=~v;
delay_ms(1);
}
}
}
void main(void)
{
DDRB=0xFF;
PORTB=0x00;
DDRD=0xFF;
PORTD=0x00;
while (1)
{
// Place your code here
motor1();
motor2();
};
}





دیدگاه