

درایور دو کاناله موتور tb6612fng
ماژول درایور موتور TB6612FNG توانایی راه اندازی دو موتور DC در جریان ثابت 1.2A ( پیک جریان 3.2A) را دارد. دو سیگنال ورودی ( IN1 و IN2) می تواند برای کنترل موتور در یکی از چهار مد CW ، CCW ، short-brake و stop استفاده شود. خروجی دو موتور این ماژول (A و B) قابلیت کنترل بصورت مجزا را دارد. سرعت هر موتور توسط یک سیگنال ورودی PWM با فرکانسی تا 100KHz کنترل میشود. پین STBY باید در حالت High باشد تا موتور از حالت standby خارج شود. ولتاژ تغذیه منطقی (VCC) می تواند در محدوده 2.7 تا 5 ولت باشد و همچنین ولتاژ تغذیه موتور (VM) تا ماکزمیم ولتاژ 15 ولت محدود است. جریان خروجی این ماژول به میزان 1.2A در هر کانال ( یا تا 3.2A برای یک سیگنال پالس کوتاه) است. این ماژول با برد های آردینو کاملا سازگار است.
ویژگی ها
ولتاژ تغذیه : VM=15V MAX و VCC=2.7-5.5V
جریان خروجی: متوسط 1.2A و پیک جریان 3.2A
با قابلیت کنترل standby برای صرفه جویی در مصرف انرژی
دارای مدهای کنترلی CW/CCW/short brake/stop موتور
دارای مدار داخلی shutdown حرارتی و سنجش ولتاژ پایین
دارای فیلتر خازنی بر روی هر دو خط تغذیه
مثال
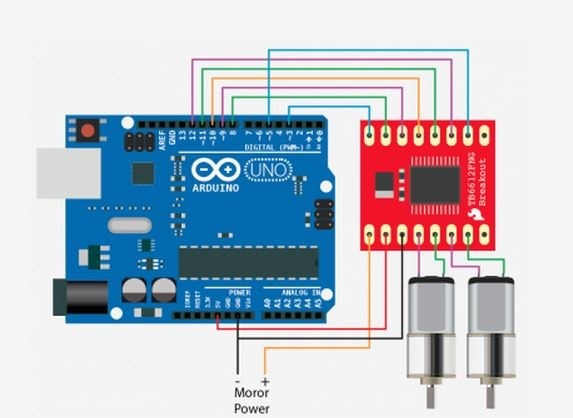
مثال زیر کنترل دو موتور DC از طریق ماژول TB6612FNG متصل به آردینو را نشان می دهد.
لینک دانلود پروژه
ماژول درایور موتور TB6612FNG توانایی راه اندازی دو موتور DC در جریان ثابت 1.2A ( پیک جریان 3.2A) را دارد. دو سیگنال ورودی ( IN1 و IN2) می تواند برای کنترل موتور در یکی از چهار مد CW ، CCW ، short-brake و stop استفاده شود. خروجی دو موتور این ماژول (A و B) قابلیت کنترل بصورت مجزا را دارد. سرعت هر موتور توسط یک سیگنال ورودی PWM با فرکانسی تا 100KHz کنترل میشود. پین STBY باید در حالت High باشد تا موتور از حالت standby خارج شود. ولتاژ تغذیه منطقی (VCC) می تواند در محدوده 2.7 تا 5 ولت باشد و همچنین ولتاژ تغذیه موتور (VM) تا ماکزمیم ولتاژ 15 ولت محدود است. جریان خروجی این ماژول به میزان 1.2A در هر کانال ( یا تا 3.2A برای یک سیگنال پالس کوتاه) است. این ماژول با برد های آردینو کاملا سازگار است.
ویژگی ها
ولتاژ تغذیه : VM=15V MAX و VCC=2.7-5.5V
جریان خروجی: متوسط 1.2A و پیک جریان 3.2A
با قابلیت کنترل standby برای صرفه جویی در مصرف انرژی
دارای مدهای کنترلی CW/CCW/short brake/stop موتور
دارای مدار داخلی shutdown حرارتی و سنجش ولتاژ پایین
دارای فیلتر خازنی بر روی هر دو خط تغذیه
مثال
مثال زیر کنترل دو موتور DC از طریق ماژول TB6612FNG متصل به آردینو را نشان می دهد.
کد HTML:
//motor A connected between A01 and A02
//motor B connected between B01 and B02
int STBY = 10; //standby
//Motor A
int PWMA = 3; //Speed control
int AIN1 = 9; //Direction
int AIN2 = 8; //Direction
//Motor B
int PWMB = 5; //Speed control
int BIN1 = 11; //Direction
int BIN2 = 12; //Direction
void setup(){
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
}
void loop(){
move(1, 255, 1); //motor 1, full speed, left
move(2, 255, 1); //motor 2, full speed, left
delay(1000); //go for 1 second
stop(); //stop
delay(250); //hold for 250ms until move again
move(1, 128, 0); //motor 1, half speed, right
move(2, 128, 0); //motor 2, half speed, right
delay(1000);
stop();
delay(250);
}
void move(int motor, int speed, int direction){
//Move specific motor at speed and direction
//motor: 0 for B 1 for A
//speed: 0 is off, and 255 is full speed
//direction: 0 clockwise, 1 counter-clockwise
digitalWrite(STBY, HIGH); //disable standby
boolean inPin1 = LOW;
boolean inPin2 = HIGH;
if(direction == 1){
inPin1 = HIGH;
inPin2 = LOW;
}
if(motor == 1){
digitalWrite(AIN1, inPin1);
digitalWrite(AIN2, inPin2);
analogWrite(PWMA, speed);
}else{
digitalWrite(BIN1, inPin1);
digitalWrite(BIN2, inPin2);
analogWrite(PWMB, speed);
}
}
void stop(){
//enable standby
digitalWrite(STBY, LOW);
}