

پاسخ : کمک برای (قدم ب قدم ساختن ربات مسیریاب پیشرفته )
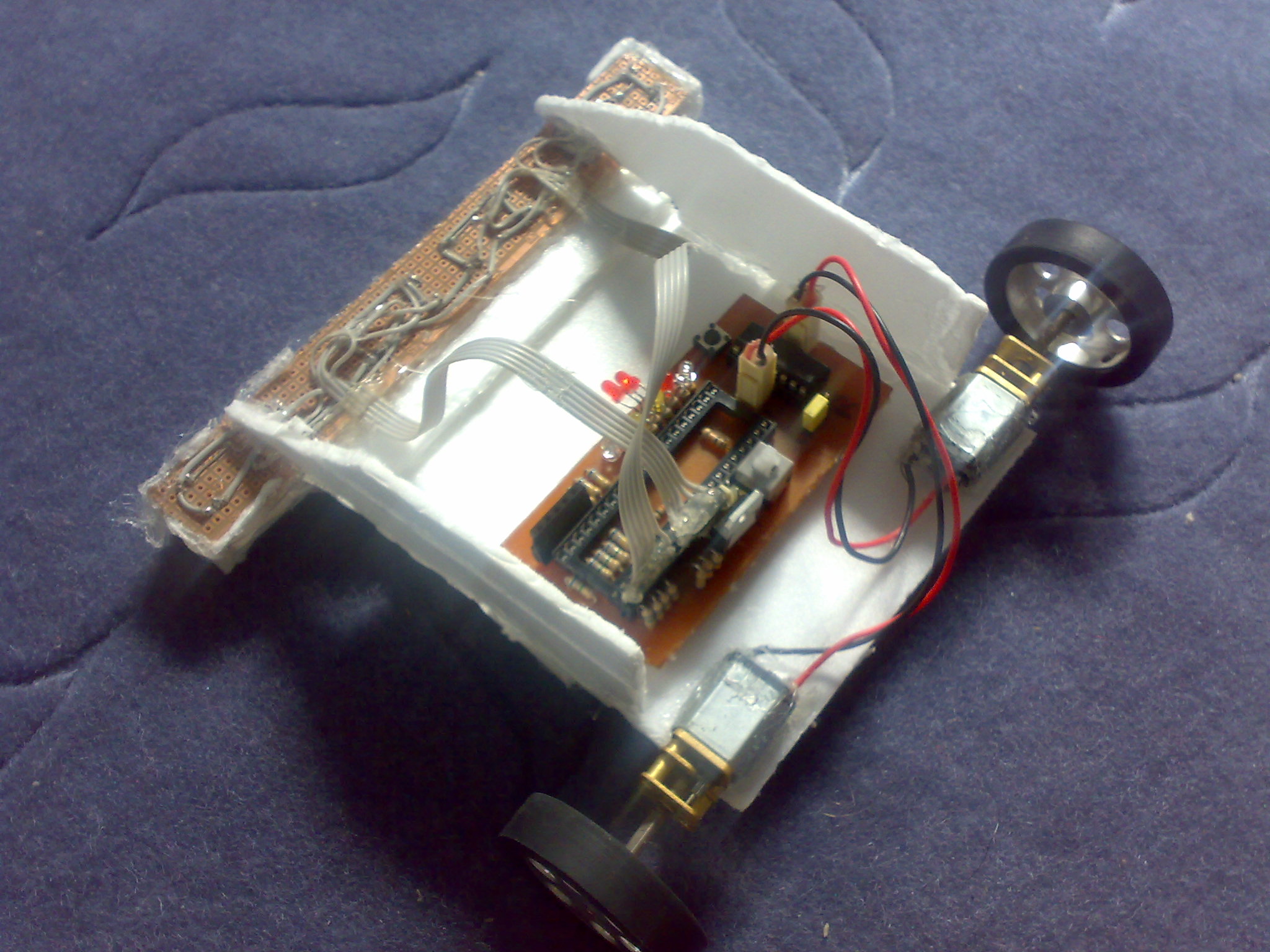
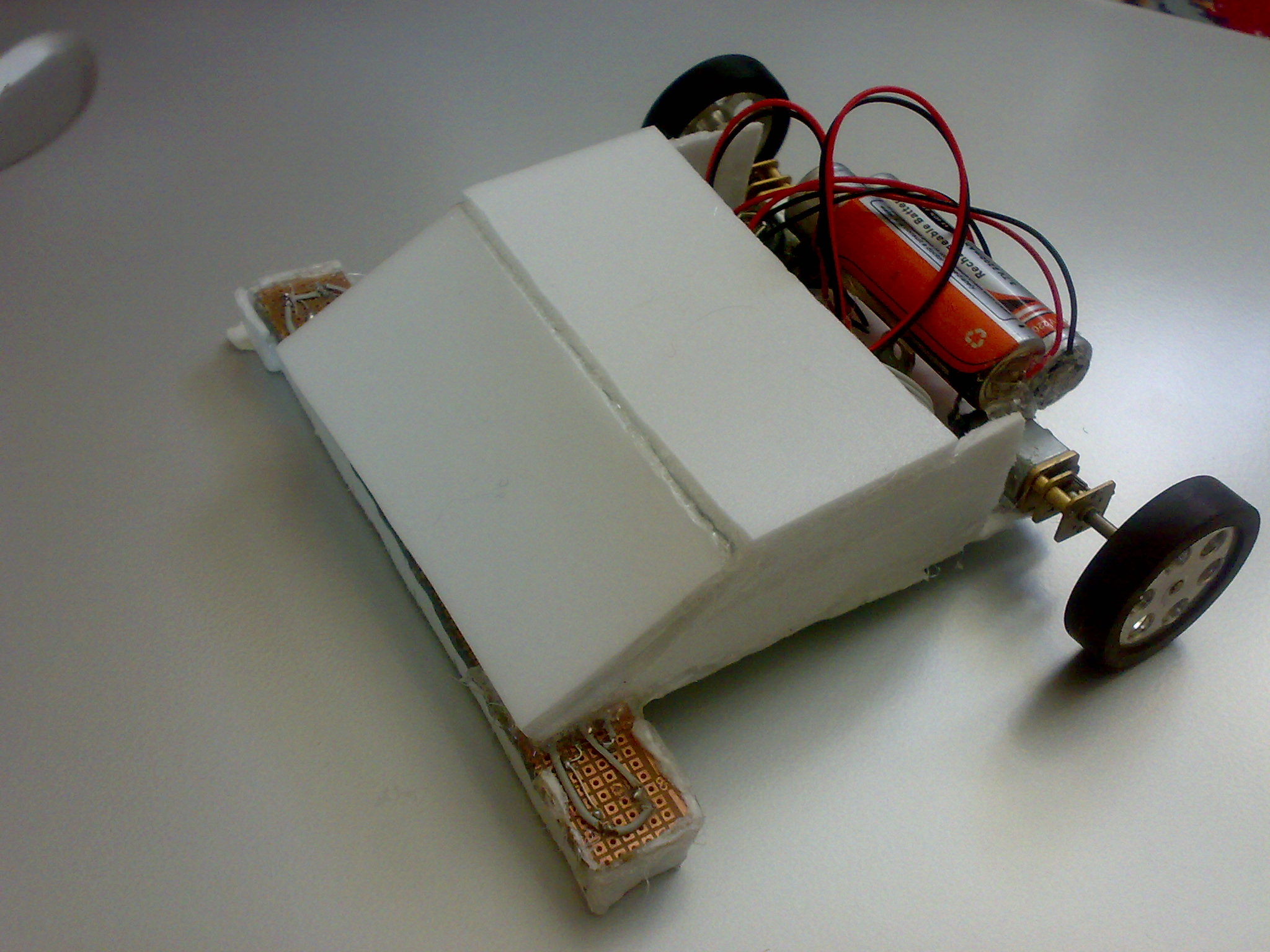
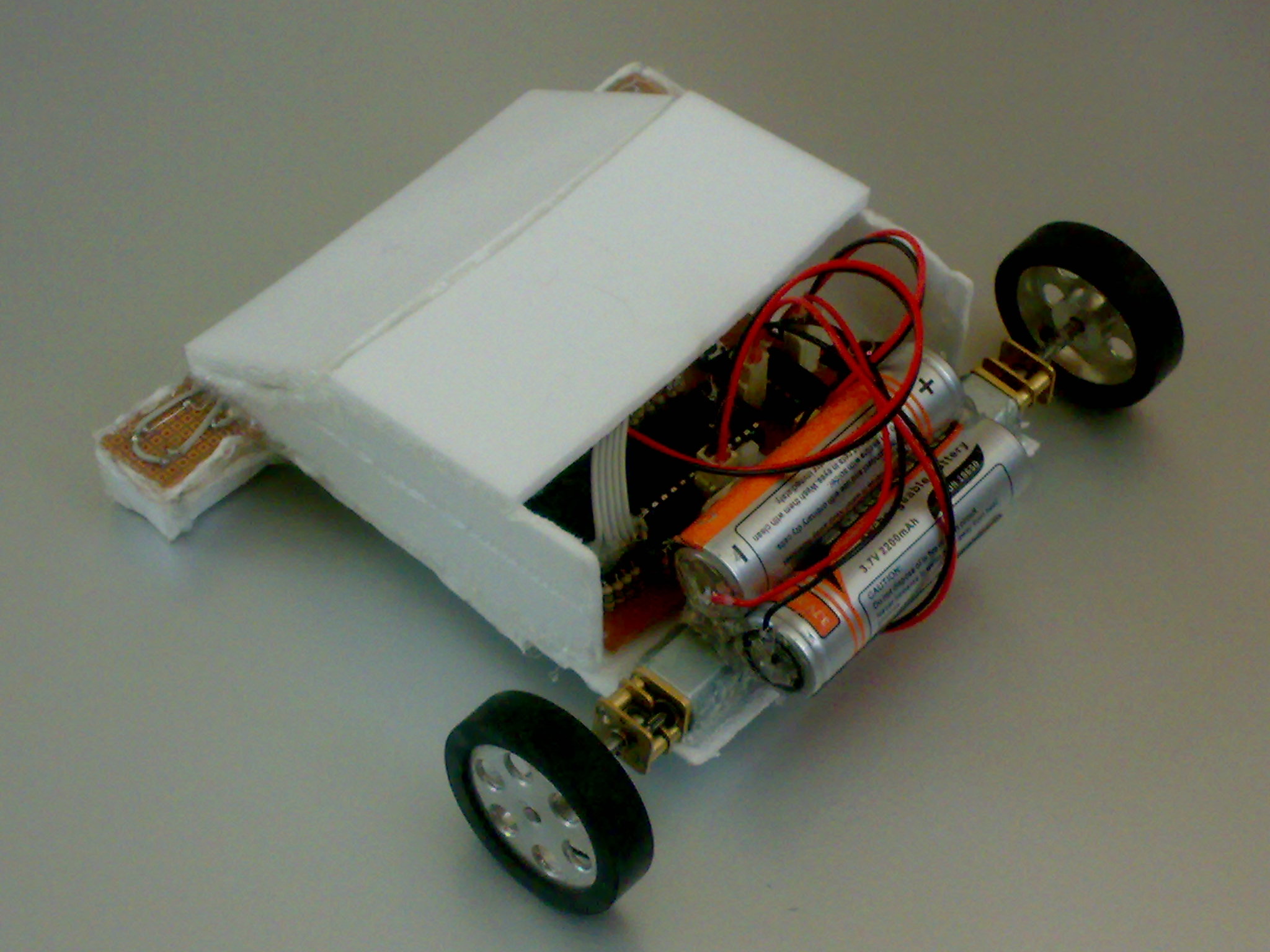
چون سرعت عمل میره بالا تر منظورم دور زدنه تا زه اصطکاک و انرژی کمتری تلف میشه با 4تا چرخ عکس والعمل روبو نسبت به پیچ های تند کمه حتی اگر از سیستم فرمون توش بهره ببری
نوشته اصلی توسط maedeh_r


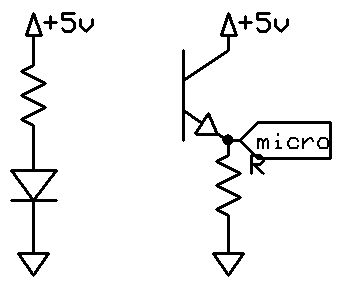


 .مثلا در مورد انتخاب قطعات راهنمایی کنید.
.مثلا در مورد انتخاب قطعات راهنمایی کنید.


 oo:
oo:
دیدگاه