

پاسخ : پروژه کامل ریموت 4 کاناله رادیویی ASK لرنینگ
با سلام و شرمنده که کمی دیر کردم در دادن پاسخ چند روزه نتونستم بیام نت
دوست من بله کار این شستی همینه که میفرمایید زمین کردن پایه 18
اون قطعه ای هم که میفرمایید یه پین هدر هست و کارش تست عمل کرد ریموت هست با زمین کردن هر یک از پایه های فوق میتونید عمل کرد هریک از کلید های روی ریموت رو بدون لرن کردن ببینید و فقط جنبه تست داره
در مورد کلید هم باید بگم حتما برد شما بازهم مشکل داره که مانع کارکرد درست مدار میشه
کلید لرن سه حالت داره
1 - حالت اول اینکه با فشار و نگه داشتن این کلید تا سرعت led یک مرحله زیاد بشه
این مرحله برای لرن ریموت هست و بعد از رفتن به این حالت باید یکی از کلیدهای ریموت رو نگه دارید تا ریموت لرن بشه در صورتی که ریموت لرن بشه برد صریعا از این حالت خارج شده و به حالت عادی برمیگرده
2 - حالت دوم اینکه کلید لرن رو بیشتر از حالت اول نگه دارید تا سرعت led بعد از رفتن به حالت یک به حالت سرعتر از حالت اول بره
این مرحله برای پاک کردن یک ریموت به کار میره در این حالت هم مثل مرحله قبل باید یکی از کلید های ریموت رو نگه دارید تا برد بعد از شناسایی ریموت اون رو از لیست ریموت ها پاک کنه
3 - حالت سوم اینکه کلید رو به قدری نگه دارید تا بعد ار رد شدن از مرحله های اول و دوم led ثابت روشن بمونه
این مرحله برای پاک کردن همه ریموت ها به کار میره توجه کنید که در این مرحله دیگه نیازی به زدن کلید ریموت نیست و به محض ورود به این مرحله همه ریموتها پاک خواهد شد و بعد از پایان خود به خود از این مرحله خارج و به حالت عادی میره
!!! یه نکته رو باید بگم و اون اینه که در مرحله های اول و دوم اگر بعد از ورود به این مراحل کلید ریموت زده نشه یا ماژول دیتای درستی به میکرو نده بعد از حدود 30 ثانیه LED دوباره به حالت عادی خواهد رفت و از این حالت خارج خواهد شد زمان لرن شدن حدود 2 ثانیه هست یعنی بعد از ورود به مرحله های اول یا دوم و زدن کلید ریموت فقط 2 ثانیه بعد برد باید از مرحله فوق خارج بشه در غیر این صورت باید دنبال مشکل باشید
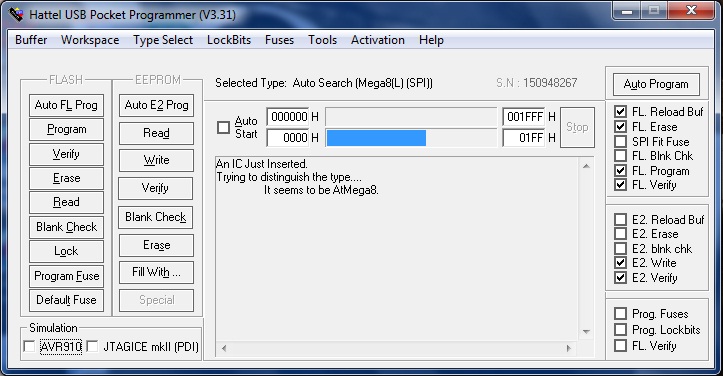
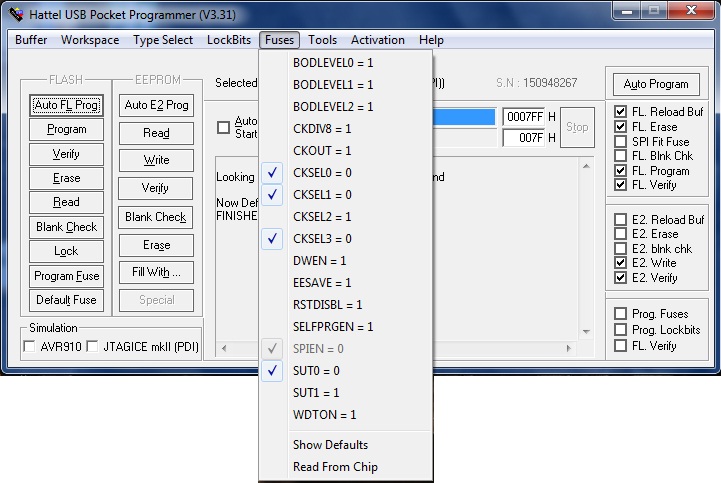
اما در مورد جمله اخر باید بگم فکر کنم شما فرکانس میکرو رو روی 8 مگا هرتز تنظیم نکردید لطفا دوباره چک کنید
به همین سادگی:nice:
نوشته اصلی توسط purealone
دوست من بله کار این شستی همینه که میفرمایید زمین کردن پایه 18
اون قطعه ای هم که میفرمایید یه پین هدر هست و کارش تست عمل کرد ریموت هست با زمین کردن هر یک از پایه های فوق میتونید عمل کرد هریک از کلید های روی ریموت رو بدون لرن کردن ببینید و فقط جنبه تست داره
در مورد کلید هم باید بگم حتما برد شما بازهم مشکل داره که مانع کارکرد درست مدار میشه
کلید لرن سه حالت داره
1 - حالت اول اینکه با فشار و نگه داشتن این کلید تا سرعت led یک مرحله زیاد بشه
این مرحله برای لرن ریموت هست و بعد از رفتن به این حالت باید یکی از کلیدهای ریموت رو نگه دارید تا ریموت لرن بشه در صورتی که ریموت لرن بشه برد صریعا از این حالت خارج شده و به حالت عادی برمیگرده
2 - حالت دوم اینکه کلید لرن رو بیشتر از حالت اول نگه دارید تا سرعت led بعد از رفتن به حالت یک به حالت سرعتر از حالت اول بره
این مرحله برای پاک کردن یک ریموت به کار میره در این حالت هم مثل مرحله قبل باید یکی از کلید های ریموت رو نگه دارید تا برد بعد از شناسایی ریموت اون رو از لیست ریموت ها پاک کنه
3 - حالت سوم اینکه کلید رو به قدری نگه دارید تا بعد ار رد شدن از مرحله های اول و دوم led ثابت روشن بمونه
این مرحله برای پاک کردن همه ریموت ها به کار میره توجه کنید که در این مرحله دیگه نیازی به زدن کلید ریموت نیست و به محض ورود به این مرحله همه ریموتها پاک خواهد شد و بعد از پایان خود به خود از این مرحله خارج و به حالت عادی میره
!!! یه نکته رو باید بگم و اون اینه که در مرحله های اول و دوم اگر بعد از ورود به این مراحل کلید ریموت زده نشه یا ماژول دیتای درستی به میکرو نده بعد از حدود 30 ثانیه LED دوباره به حالت عادی خواهد رفت و از این حالت خارج خواهد شد زمان لرن شدن حدود 2 ثانیه هست یعنی بعد از ورود به مرحله های اول یا دوم و زدن کلید ریموت فقط 2 ثانیه بعد برد باید از مرحله فوق خارج بشه در غیر این صورت باید دنبال مشکل باشید
اما در مورد جمله اخر باید بگم فکر کنم شما فرکانس میکرو رو روی 8 مگا هرتز تنظیم نکردید لطفا دوباره چک کنید
به همین سادگی:nice:



 ..اگه مشکلی بود یا ما در خدمتیم...
..اگه مشکلی بود یا ما در خدمتیم... 


دیدگاه